Introduction
Bianbu Robot is a hardware–software co-design solution for next-generation intelligent robots, built on our self-developed RISC-V K1 chip and proprietary operating system. It integrates on-device AI inference, Large Language Model (LLM) support, and high-performance control, with broad compatibility across service robots, quadrupeds, drones, robotic arms, and other intelligent terminals.
The core system Bianbu ROS is built upon the self-developed Bianbu OS as the kernel and uses ROS2 as the runtime core. It integrates multimedia middleware JDK, high-performance computing libraries HPC Libs, and a development kit BRDK, forming a complete robotic application infrastructure. The system comes with built-in AI models and toolchains, supporting commonly used modules and sample references such as speech recognition, vision perception, task orchestration, and path planning — deployment-ready with minimal integration effort.
At its core, Bianbu ROS is based on the Bianbu OS kernel and uses ROS2 as the runtime framework. It incorporates multimedia middleware JDK, high-performance computing libraries HPC Libs, and the BRDK development kit to form a complete robotic application infrastructure. The system includes built-in AI models and toolchains, supporting modules and reference implementations for speech recognition, computer vision, task orchestration, and path planning — deployment-ready with minimal integration effort.
Platform Vision
Bianbu Robot aims to promote the adoption of RISC-V architecture in robotics, accelerate the development of a domestic intelligent robot ecosystem, empower intelligent perception and natural interaction capabilities, and help developers rapidly deploy next-generation smart terminals.
System Architecture
The Bianbu Robot solution integrates large language model (LLM) capabilities for natural language interaction and intelligent multi-task orchestration. It supports a wide range of intelligent terminal applications, including drones, cleaning robots, quadrupeds, robotic arms, and AI-powered consumer robotics.
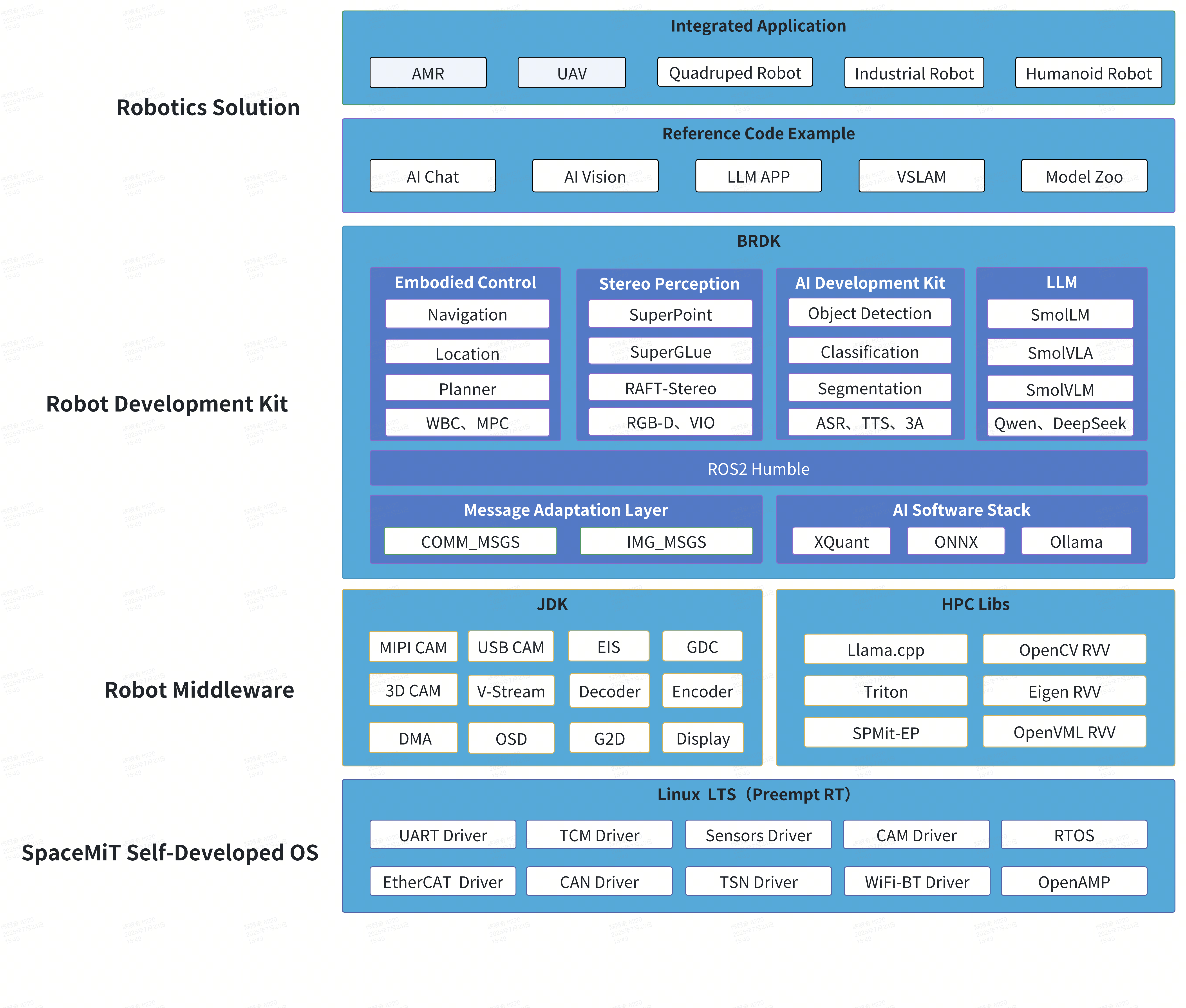
At the system level, the Bianbu Robot solution is based on the Bianbu ROS robot operating system and provides a complete reference for AI robotics. Bianbu ROS is built on the proprietary Bianbu OS, integrates deeply optimized robotic middleware and SDKs, and includes multimedia middleware JDK, high-performance computing libraries HPC Libs, and the BRDK development kit.
BRDK (Bianbu ROS Dev Kits)
BRDK performs deep abstraction and modular encapsulation based on ROS2, offering open-source reference solutions taligned with AI robotics product requirements.
- Integrated AI development toolchain Built-in quantization toolchains, foundational pretrained model libraries (Model Zoo), and sample code. Supports mainstream model formats and deployment workflows, ready to use out of the box.
- Adapted for mainstream open-source large models Natively supports DeepSeek, Qwen, Hugging Face Smol* series, and more. Integrates the large model orchestration framework LocalAI with OpenAI API-compatible frontend interfaces for seamless integration with existing ecosystems.
- Complete speech processing solution Provides product-grade ASR (speech recognition) and TTS (speech synthesis) model libraries, multi-microphone array preprocessing, sound source localization SDKs, noise suppression, and echo cancellation modules — covering the full speech interaction chain from sensing to communication.
- Open-source ROS2 service components Offers a wide range of ROS2 packages including vision perception, voice interaction, sensor integration, embodied motor control, localization and navigation, and LLM task orchestration — supporting modular integration and customized development.
- Reference application pipeline examples Provides end-to-end references covering data acquisition, processing, modeling, and interaction to help developers quickly build full robotic application systems.
JDK (Jobot Dev Kits)
JDK provides highly abstracted data pipelines based on the underlying OS, enabling modular functionality and high code reuse so developers can focus on building high-level pipelines without worrying about low-level data scheduling and system details.
- IO HUB data hub Compatible with various protocol camera devices, supports zero-copy data transfer, minimizes system bandwidth consumption, and significantly reduces power overhead.
- Hardware-accelerated pipelines Fully leverages chip-embedded hardware acceleration units in pipeline flows, supporting high-performance image operations like scaling, rotation, cropping, and blending.
- Modular programming model Supports block-style programming across the entire flow — including data acquisition, encoding, model inference, watermarking, video display, and multi-stream re-push — for flexible composition and rapid development.
- Low-latency direct display mechanism Provides flexible video direct rendering strategies, optimizes framebuffer paths, significantly reduces video pipeline latency, and meets real-time application demands.
- OpenCL accelerated library support Integrates a wide range of image enhancement and stabilization algorithms, including distortion correction and electronic image stabilization (EIS), accelerated by the AI CPU for efficient image processing.
HPC Libs (High Performance Computer Libraries)
High-performance computing is critical in robotic perception and control tasks. Bianbu Robot provides deeply optimized compute engines to maximize the hardware potential of the K1 chip.
- Basic computation libraries Integrates mainstream foundational libraries such as OpenCV for computer vision, OpenVML for math, and Eigen/OpenBLAS for linear algebra. These libraries are vectorized and deeply optimized for the RISC-V platform to fully utilize the 256-bit RISC-V Vector Extension (RVV).
- AI operator libraries Built upon custom AI instructions following the IME (Intelligent Matrix Engine) standard to form meta-operator-level AI operator libraries. By calling standard operator APIs, developers can harness powerful AI performance.
- AI accelerated inference backend Deeply adapted for the RISC-V platform with operator fusion, multithreaded scheduling, memory optimization, and dynamic SARM partitioning. Seamlessly integrates with ONNXRuntime, Llama.cpp, and other mainstream inference frameworks.
- High-performance computing language Based on a RISC-V-adapted version of OpenAI Triton, developers can write Python code to achieve near-peak hardware performance. Supports rapid migration of mainstream CUDA inference tasks to the RISC-V platform, significantly lowering adaptation costs and accelerating deployment.
Solution Highlights
The Bianbu Robot solution focuses on speech algorithms, AI vision, and large model applications, offering out-of-the-box modular services tightly coupled with chip capabilities to help clients accelerate solution deployment. SDK source code is open to support developer innovation.
- Supports a rich Model Zoo Covers large model applications, speech processing, and traditional visual AI models.
- Large model applications Compatible with Qwen2 series, DeepSeek-1.5b, SomlLM2, SomlVLM, SomlVLA series. Supports large model conversational speech interaction with end-to-end latency under 1.5 seconds.
- Speech processing Covers VAD, ASR, TTS, DOA, NS, and multi-microphone sound source localization.
- Traditional AI vision Offers optimized models for object detection, classification, tracking, and more — supporting over 1000 application scenarios.
- Localization and mapping Supports laser navigation, monocular VSLAM, and stereo visual odometry solutions.
- Supports Linux PreemptRT Compatible with industrial control protocols like EtherCAT, CAN, RS485/232 — meeting real-time control requirements.
- Low-latency video pipeline Supports up to 1080P@120FPS encoding — ideal for drone video latency demands.
- Complete toolchain Includes optimized GCC/Clang compilers, quantization tools, and large model fine-tuning tools.
Solution Advantages
Current robotic terminals heavily rely on connectivity, but privacy protection is a key challenge. Bianbu Robot effectively addresses the core challenges of deploying large models:
- Development flexibility Linux SDK system source code is fully open, with rich debugging tools to support custom algorithm development and application extension.
- Cost advantage The K1 performs baseline AI inference on the edge, reducing dependency on cloud servers and lowering total system operation costs.
- Performance balance Combines lightweight edge inference with high-performance cloud computing — ensuring local smart model upgrades while avoiding latency from cloud-only solutions, enabling always-on smart responses.
- Enhanced privacy Handles sensitive tasks (e.g., ASR) locally using on-device compute, complying with privacy laws across countries and solving regulatory concerns in large model applications.
Feedback
For issues or suggestions, please visit the project community: