3.3.5 SPI 使用说明
最新版本:2025/09/26
本文档介绍如何在开发板上配置和使用 SPI 接口。
模块介绍
SPI(Serial Peripheral Interface) 是一种 SoC 与外设之间的串行通信接口,仅支持单通道模式(x1 模式)。SPI 有 主设备(Master) 和 从设备(Slave) 两种模式,通常为一个主设备控制一个或多个从设备进行通信。
主设备通过拉低片选线选择一个从设备进行通信,完成数据交互。主设备负责提供时钟,并发起读写操作。
注: K1 SPI 当前仅支持主设备模式。
引脚功能:
| 引脚 | 功能说明 |
|---|---|
| SCLK (Serial Clock) | 时钟信号线 |
| MISO (Master In Slave Out) | 从主通信 (从设备 → 主设备数据) |
| MOSI (Master Out Slave In) | 主从通信 (主设备 → 从设备数据) |
| CS/SS (Chip Select / Slave Select) | 从设备片选信号线 |
引脚说明
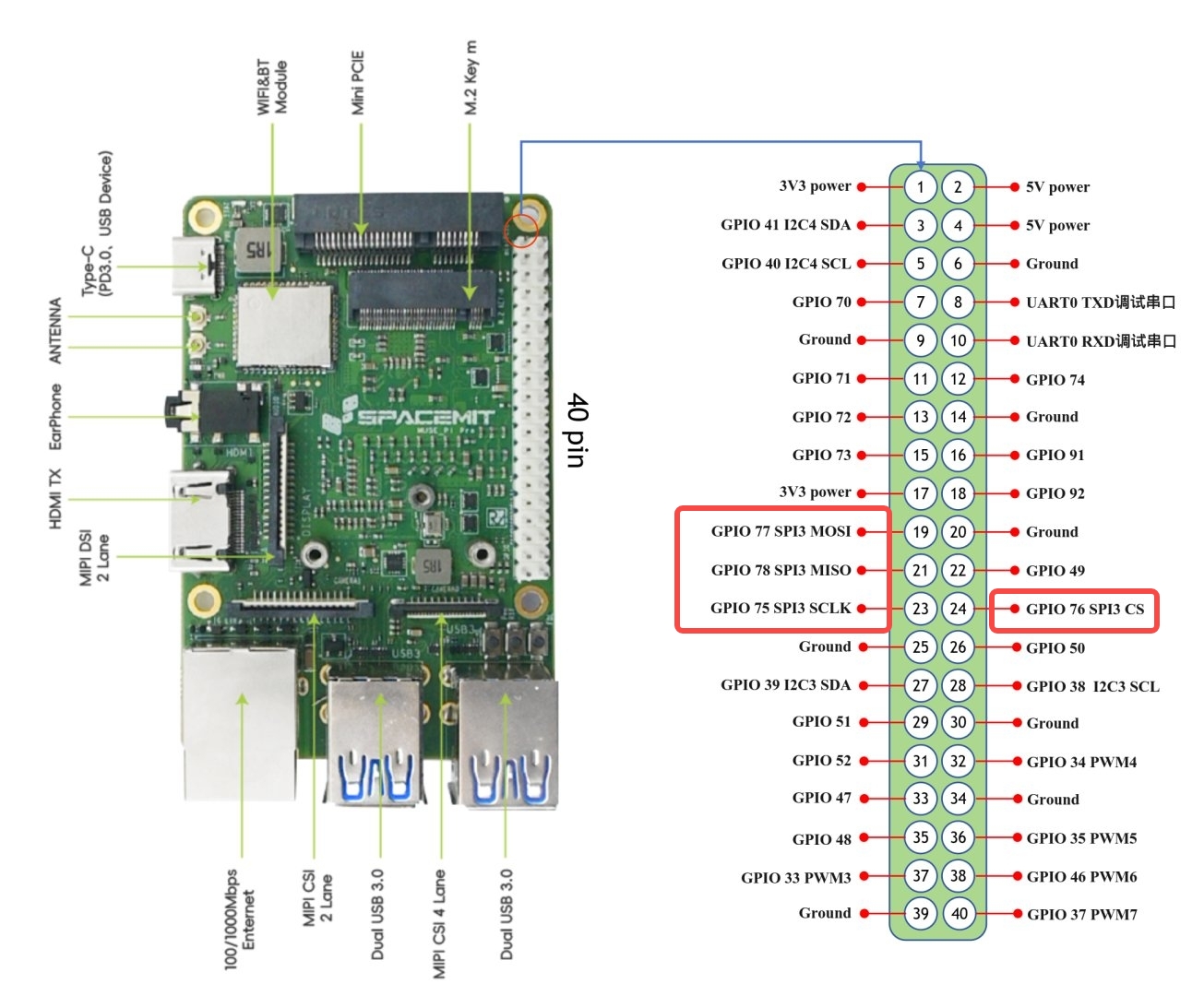
请参考《引脚定义说明》,确认开发板支持的 SPI 引脚。
以 MUSE-Pi-Pro 为例,支持的 SPI 引脚如下:
查看设备信息
-
查看系统 SPI 总线设备和驱动信息
ls /sys/bus/spi输出示例:
spi--
|-- devices //SPI 总线上的设备
|-- drivers //SPI 总线上注册的设备驱动
|-- drivers_autoprobe
|-- drivers_probe -
查看指定 SPI 总线设备的信息
ls -la /sys/bus/spi/devices/spi3.0 -
查看指定 SPI 设备的模态(设备名称)
cat /sys/bus/spi/devices/spi3.0/modalias -
查看 SPI 设备的速度模式
cat /sys/bus/spi/devices/spi3.0/of_node/spi-max-frequency
启用 SPI
SPI 引脚(GPIO75、76、77、78)与其他功能复用,使用前需要在 dts 中禁用其他冲突的设备
我们提供两种方法(二选一即可):
- 方法 A:直接下载预编译的 dtb 文件
- 方法 B:手动��修改编译 dts
方法 A:直接下载预编译的 dtb 文件
-
下载预配置的 dtb 文件
wget https://archive.spacemit.com/ros2/prebuilt/brdk_libs/spi/k1-x_MUSE-Pi-Pro.dtb -
将文件保存到
/boot/spacemit/6.6.63/,以替换原有 dtb 文件。
方法 B:手动修改编译 dts
-
获取开发板设备树 dts 文件
cd /boot/spacemit/6.6.63/ //设备树所在分区
sudo apt update
sudo apt install device-tree-compiler //编译工具
sudo dtc -I dtb -O dts -o k1-x_MUSE-Pi-Pro.dts k1-x_MUSE-Pi-Pro.dtb // 反编译 dtb 为 dts
ls
//若出现 k1-x_MUSE-Pi-Pro.dts,即反编译成功 -
修改设备树 编辑
k1-x_MUSE-Pi-Pro.dts,找到以下两个 SPI 节点并进行修改:-
修改 spi@d420c000 节点:
- 禁用原有节点和 flash 子节点:设置
status = "disabled" - 添加 spi@3 子节点
- 禁用原有节点和 flash 子节点:设置
-
修改 spi@d401c000 节点:
- 添加 spi@3 子节点
具体修改内容如下:
// 修改 spi@d420c000 节点
spi@d420c000 {
compatible = "spacemit,k1x-qspi";
#address-cells = <0x01>;
#size-cells = <0x00>;
reg = <0x00 0xd420c000 0x00 0x1000 0x00 0xb8000000 0x00 0xc00000>;
reg-names = "qspi-base\0qspi-mmap";
k1x,qspi-sfa1ad = <0x4000000>;
k1x,qspi-sfa2ad = <0x100000>;
k1x,qspi-sfb1ad = <0x100000>;
k1x,qspi-sfb2ad = <0x100000>;
clocks = <0x03 0x8f 0x03 0x90>;
clock-names = "qspi_clk\0qspi_bus_clk";
resets = <0x1d 0x4e 0x1d 0x4f>;
reset-names = "qspi_reset\0qspi_bus_reset";
k1x,qspi-pmuap-reg = <0xd4282860>;
k1x,qspi-mpmu-acgr-reg = <0xd4051024>;
k1x,qspi-freq = <0x1945ba0>;
k1x,qspi-id = <0x04>;
power-domains = <0x20 0x00>;
cpuidle,pm-runtime,sleep;
interrupts = <0x75>;
interrupt-parent = <0x1e>;
k1x,qspi-tx-dma = <0x01>;
k1x,qspi-rx-dma = <0x01>;
dmas = <0x21 0x2d 0x01>;
dma-names = "tx-dma";
interconnects = <0x22>;
interconnect-names = "dma-mem";
status = "disabled"; // 禁用该节点
pinctrl-names = "default";
pinctrl-0 = <0x5b>;
flash@0 {
compatible = "jedec,spi-nor";
reg = <0x00>;
spi-max-frequency = <0x1945ba0>;
m25p,fast-read;
broken-flash-reset;
status = "disabled"; // 禁用 flash 子节点
};
// 添加 spi@3 子节点
spi@3 {
compatible = "cisco,spi-petra";
reg = <0x0>;
spi-max-frequency = <6400000>;
status = "okay";
};
};// 修改 spi@d401c000 节点
spi@d401c000 {
compatible = "spacemit,k1x-spi";
reg = <0x00 0xd401c000 0x00 0x34>;
k1x,ssp-id = <0x03>;
k1x,ssp-clock-rate = <0x186a000>;
dmas = <0x21 0x14 0x01 0x21 0x13 0x01>;
dma-names = "rx\0tx";
power-domains = <0x20 0x00>;
cpuidle,pm-runtime,sleep;
interrupt-parent = <0x1e>;
interrupts = <0x37>;
clocks = <0x03 0x58>;
resets = <0x1d 0x18>;
#address-cells = <0x01>;
#size-cells = <0x00>;
interconnects = <0x22>;
interconnect-names = "dma-mem";
status = "okay";
pinctrl-names = "default";
pinctrl-0 = <0x2e>;
k1x,ssp-disable-dma;
// 添加 spi@3 子节点
spi@3 {
compatible = "cisco,spi-petra";
reg = <0x0>;
spi-max-frequency = <6400000>;
status = "okay";
};
}; -
-
编译新设备树
sudo dtc -I dts -O dtb -o k1-x_MUSE-Pi-Pro.dtb k1-x_MUSE-Pi-Pro.dts
替换内核镜像文件
替换镜像文件
// 获取
wget https://archive.spacemit.com/ros2/prebuilt/brdk_libs/spi/vmlinuz-6.6.63
// 移动或复制到 /boot/ 目录下,覆盖旧的镜像 vmlinuz-6.6.63
重启开发板使更改生效
sudo reboot
重启后在 /dev/ 下可查看 spi3.0 设备
使用示例
-
连接任意一款 SPI 设备到开发板
连接方式
主设备 (Master) <===> 从设备 (Slave)
SCK --------------> SCK
MOSI --------------> MOSI (或 SDI)
MISO <-------------- MISO (或 SDO)
CS0 --------------> CS (或 nSS) -
查看设备
ls /dev/spi*
//输出示例
spi3 -
SPI 主设备示例代码
//spi_master.c
#include <stdio.h>
#include <stdlib.h>
#include <fcntl.h>
#include <unistd.h>
#include <sys/ioctl.h>
#include <linux/spi/spidev.h>
#include <string.h>
#include <stdint.h>
#define SPI_DEV "/dev/spidev3.0"
#define BUF_SIZE 32
static uint32_t mode = SPI_MODE_0;
static uint8_t bits = 8;
static uint32_t speed = 1000000;
int spi_init()
{
int fd = open(SPI_DEV, O_RDWR);
if (fd < 0) {
perror("无法打开SPI设备");
return -1;
}
if (ioctl(fd, SPI_IOC_WR_MODE, &mode) < 0) {
perror("无法设置SPI模式");
goto error;
}
if (ioctl(fd, SPI_IOC_WR_BITS_PER_WORD, &bits) < 0) {
perror("无法设置字长");
goto error;
}
if (ioctl(fd, SPI_IOC_WR_MAX_SPEED_HZ, &speed) < 0) {
perror("无法设置SPI速度");
goto error;
}
return fd;
error:
close(fd);
return -1;
}
int spi_transfer(int fd, uint8_t *tx_buf, uint8_t *rx_buf, int len)
{
struct spi_ioc_transfer tr =
{
.tx_buf = (unsigned long)tx_buf,
.rx_buf = (unsigned long)rx_buf,
.len = len,
.speed_hz = speed,
.bits_per_word = bits,
.delay_usecs = 0,
};
if (ioctl(fd, SPI_IOC_MESSAGE(1), &tr) < 1) {
perror("SPI传输失败");
return -1;
}
return 0;
}
int main()
{
int fd = spi_init();
if (fd < 0) return 1;
uint8_t tx_buf[BUF_SIZE] = {0};
uint8_t rx_buf[BUF_SIZE] = {0};
tx_buf[0] = 0x9f;
spi_transfer(fd, tx_buf, rx_buf, strlen((char *)tx_buf) + 3);
printf("从设备响应: %x%x%x%x\n", rx_buf[0], rx_buf[1], rx_buf[2], rx_buf[3]);
while (1)
{
printf("Master> ");
fgets((char *)tx_buf, BUF_SIZE, stdin);
if (strncmp((char *)tx_buf, "quit", 4) == 0) break;
if (spi_transfer(fd, tx_buf, rx_buf, strlen((char *)tx_buf) + 3) == 0) {
printf("从设备响应: %x%x%x%x\n", rx_buf[0], rx_buf[1], rx_buf[2], rx_buf[3]);
}
memset(tx_buf, 0, BUF_SIZE);
memset(rx_buf, 0, BUF_SIZE);
}
close(fd);
return 0;
}
-
在主机上交叉编译此文件
riscv64-unknown-linux-gnu-gcc -O2 -mcpu=spacemit-x60 -march=rv64gc_zba_zbb_zbc_zbs spi_master.c -o spi_master编译工具下载及使用方法见交叉编译工具手册
-
复制可执行文件到开发板
scp spi_master bianbu@10.0.91.35:/home/bianbu说明:
-
scp- SSH 远程复制命令 -
spi_master- 可执行文件名 -
bianbu- 开发板用户名 -
10.0.91.35- 开发板 IP 地址(可 使用hostname -I查看板子的 IP 地址) -
/home/bianbu- 存储路径(自定义)
注意: 使用
scp命令时,需要确保开发板和主机在同一局域网下 -
-
在开发板上运行该程序
sudo ./spi_master示例输出:
从设备响应: 0000
Master> 9f
从设备响应: 0000