3.6.1 深度相机使用
简介
本文档适用于市面上常见的 HBV 系列双目相机,特别是双目、黑白、全局曝光、720P规格的双目相机。

软件安装
首先需要安装 GStreamer,安装步骤请参考:GStreamer 使用指南
使用指南
重要提示:请确保相机连接到 USB 3.0 接口
查看相机设备与支持格式
运行以下命令获取相机支持的分辨率与格式:
gst-device-monitor-1.0
命令输出中会显示相机的详细信息:
Device found:
name : USB Global Camera (V4L2)
class : Video/Source
caps : image/jpeg, width=2560, height=720, framerate={ (fraction)60/1, (fraction)60/1 }
image/jpeg, width=1600, height=600, framerate=100/1
image/jpeg, width=1280, height=480, framerate=100/1
image/jpeg, width=1280, height=400, framerate=120/1
image/jpeg, width=1280, height=720, framerate=120/1
image/jpeg, width=1280, height=712, framerate=120/1
image/jpeg, width=800, height=600, framerate=120/1
image/jpeg, width=800, height=592, framerate=120/1
image/jpeg, width=640, height=480, framerate=120/1
image/jpeg, width=640, height=472, framerate=120/1
image/jpeg, width=640, height=400, framerate=120/1
image/jpeg, width=640, height=392, framerate=120/1
image/jpeg, width=640, height=240, framerate=100/1
image/jpeg, width=320, height=240, framerate=120/1
image/jpeg, width=320, height=232, framerate=120/1
image/jpeg, width=2560, height=720, framerate={ (fraction)60/1, (fraction)60/1 }
video/x-raw, format=YUY2, width=2560, height=720, framerate={ (fraction)60/1, (fraction)60/1 }
video/x-raw, format=YUY2, width=1600, height=600, framerate=100/1
video/x-raw, format=YUY2, width=1280, height=480, framerate=100/1
video/x-raw, format=YUY2, width=1280, height=400, framerate=120/1
video/x-raw, format=YUY2, width=1280, height=720, framerate=120/1
video/x-raw, format=YUY2, width=1280, height=712, framerate=120/1
video/x-raw, format=YUY2, width=800, height=600, framerate=120/1
video/x-raw, format=YUY2, width=800, height=592, framerate=120/1
video/x-raw, format=YUY2, width=640, height=480, framerate=120/1
video/x-raw, format=YUY2, width=640, height=472, framerate=120/1
video/x-raw, format=YUY2, width=640, height=400, framerate=120/1
video/x-raw, format=YUY2, width=640, height=392, framerate=120/1
video/x-raw, format=YUY2, width=640, height=240, framerate=100/1
video/x-raw, format=YUY2, width=320, height=240, framerate=120/1
video/x-raw, format=YUY2, width=320, height=232, framerate=120/1
video/x-raw, format=YUY2, width=2560, height=720, framerate={ (fraction)60/1, (fraction)60/1 }
properties:
api.v4l2.cap.bus_info = usb-xhci-hcd.0.auto-1
api.v4l2.cap.capabilities = 84a00001
api.v4l2.cap.card = USB Global Camera: USB Global C
api.v4l2.cap.device-caps = 04200001
api.v4l2.cap.driver = uvcvideo
api.v4l2.cap.version = 6.6.63
api.v4l2.path = /dev/video20
device.api = v4l2
device.devids = 20785
device.id = 80
device.product.id = 0x155
device.vendor.id = 0x15a
factory.name = api.v4l2.source
media.class = Video/Source
node.description = USB Global Camera (V4L2)
node.name = v4l2_input.platform-xhci-hcd.0.auto-usb-0_1_1.0
node.nick = USB Global Camera
node.pause-on-idle = false
object.path = v4l2:/dev/video20
priority.session = 800
factory.id = 10
client.id = 35
clock.quantum-limit = 8192
media.role = Camera
node.driver = true
object.id = 81
object.serial = 90
gst-launch-1.0 pipewiresrc target-object=90 ! ...
说明:
- 上半部分 (
caps): 列出了相机支持的分辨率和帧率,包括image/jpeg和video/x-raw等格式。 - 下半部分 (
properties): 显示设备的详细属性信息,其中api.v4l2.path(如/dev/video20)是后续操作中需要使用的设备号。
启动相机
相机支持两种模式:
方式一:video/x-raw 模式(无解码,需 USB3.0 支持)
gst-launch-1.0 v4l2src device=/dev/video20 io-mode=2 ! "video/x-raw, width=2560, height=720, framerate=60/1" ! videoconvert ! waylandsink
方式二:image/jpeg 模式(含解码,无需 USB3.0)
#如果上一次已经运行过该指令,并用 Ctrl+C 结束的话,需要运行两次指令即可正常显示
gst-launch-1.0 v4l2src device=/dev/video20 io-mode=2 ! "image/jpeg, width=2560, height=720, framerate=60/1" ! spacemitdec ! videoconvert ! video/x-raw, format=NV12 ! waylandsink
如果遇到错误如下:
[MPP-ERROR] 11672:dequeueBuffer:495 Failed to dequeue buffer. type=9, memory=1
[MPP-ERROR] 11672:handleOutputBuffer:1431 dequeueBuffer failed, this dequeueBuffer must successed, because it is after Poll, please check! maybe after EOS?
可以尝试多次运行指令,或者重新插拔相机即可
保存视频
video/x-raw 模式:
gst-launch-1.0 v4l2src device=/dev/video20 io-mode=2 ! "video/x-raw, width=2560, height=720, framerate=60/1" ! videoconvert ! video/x-raw, format=NV12 ! spacemith264enc ! filesink location=output.h264
image/jpeg 模式:
gst-launch-1.0 v4l2src device=/dev/video20 io-mode=2 ! "image/jpeg, width=2560, height=720, framerate=60/1" ! spacemitdec ! videoconvert ! video/x-raw, format=NV12 ! spacemith264enc ! filesink location=output.h264
在 OpenCV 中使用相机
注意: 编译 OpenCV 时需开启 WITH_GSTREAMER 选项。
CMakeLists.txt:
# ------------------------
# CMakeLists.txt
# put the file in the project root directory
# ~/project/CMakeLists.txt
# ------------------------
cmake_minimum_required(VERSION 3.10)
project(stereo_test)
set(CMAKE_CXX_STANDARD 11)
set(CMAKE_CXX_STANDARD_REQUIRED ON)
set(CMAKE_BUILD_TYPE Release)
find_package(OpenCV REQUIRED)
include_directories(${OpenCV_INCLUDE_DIRS})
add_executable(stereo_test main.cpp)
target_link_libraries(stereo_test ${OpenCV_LIBS} yaml-cpp)
main.cpp:
// ------------------------
// main.cpp
// put the file in the project root directory
// ~/project/main.cpp
// ------------------------
#include <chrono>
#include <csignal>
#include <atomic>
#include <chrono>
#include <opencv2/opencv.hpp>
std::atomic<bool> running(true);
void signal_handler(int signum) {
std::cout << "\nCaught signal " << signum << ", exiting...\n";
running = false; // 设置标志,退出 while 循环
}
int main(int argc, char **argv){
signal(SIGINT, signal_handler); // 捕获 Ctrl-C 信号
int video_idx = std::stoi(argv[1]);
std::string gst_pipeline = "v4l2src device=/dev/video" + std::to_string(video_idx) + " io-mode=2 ! " +
"video/x-raw,format=YUY2,width=2560,height=720,framerate=60/1 ! " +
"appsink";
cv::VideoCapture cap(gst_pipeline, cv::CAP_GSTREAMER);
if (!cap.isOpened()) {
std::cerr << "Failed to open camera" << std::endl;
return -1;
}
auto t0 = std::chrono::steady_clock::now();
cv::Mat frame;
int frame_id = 0;
while(running && cap.grab()){
cap.retrieve(frame);
frame_id += 1;
if(frame_id % 100 == 0){
auto t1 = std::chrono::steady_clock::now();
auto duration = std::chrono::duration_cast<std::chrono::microseconds>(t1 - t0).count();
printf("FPS %.2f Process \r\n", 100 / (duration / 1000000.0));
t0 = t1;
}
}
cap.release();
return 0;
}
编译运行
cd ~/project
mkdir build && cd build
cmake ..
make
./stereo_test 20
双目校准流程
双目相机的校准流程如下:
-
准备标定板
- 使用 标定板生成网页 创建棋盘格标定板。
- 选择 Checkerboard, 页面长宽设置在 297x210 (符合 A4 纸标准), 并打印。
- 棋盘格数量大于 6X8,宽度大于 25mm。
-
拍摄标定板图像
- 使用指定分辨率拍摄标定板图像,并用代码分开左右目,并分别存到两个文件夹中(
left和right文件夹)。 - 拍摄要求:
- 拍摄时双目必须同时看到棋盘格的全貌
- 需要拍摄不同距离不同角度的棋盘格
- 需要避免相机的大幅晃动,稳定时再拍照
- 需要避免标定板的反光
以下为拍摄标定板图像的代码:
import cv2
import numpy as np
import os
cap = cv2.VideoCapture("/dev/video0")#实际设备号
cap.set(cv2.CAP_PROP_FRAME_WIDTH, 1280)#根据需要分辨率进行指定
cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 480)#根据需要分辨率进行指定
if os.path.exists("save"):
#directly remove the folder if it exists
os.system("rm -r save")
os.makedirs("save")
os.mkdir("save/left")
os.mkdir("save/right")
left_dir = "save/left"
right_dir = "save/right"
assert cap.isOpened(), "Cannot capture source"
cnt = 0
while True:
flag, frame = cap.read()
if not flag:
break
cv2.imshow("frame", frame)
left = frame[:, :frame.shape[1]//2]
right = frame[:, frame.shape[1]//2:]
key = cv2.waitKey(1)
if key == ord('q'):
break
if key == ord('s'):
cv2.imwrite(f"save/left/frame{cnt}.jpg", left)
cv2.imwrite(f"save/right/frame{cnt}.jpg", right)
cnt+=1
cap.release()
cv2.destroyAllWindows() - 使用指定分辨率拍摄标定板图像,并用代码分开左右目,并分别存到两个文件夹中(
-
Matlab 标定 MatLab中调用标定程序,生成标定文件。 示例界面截图:

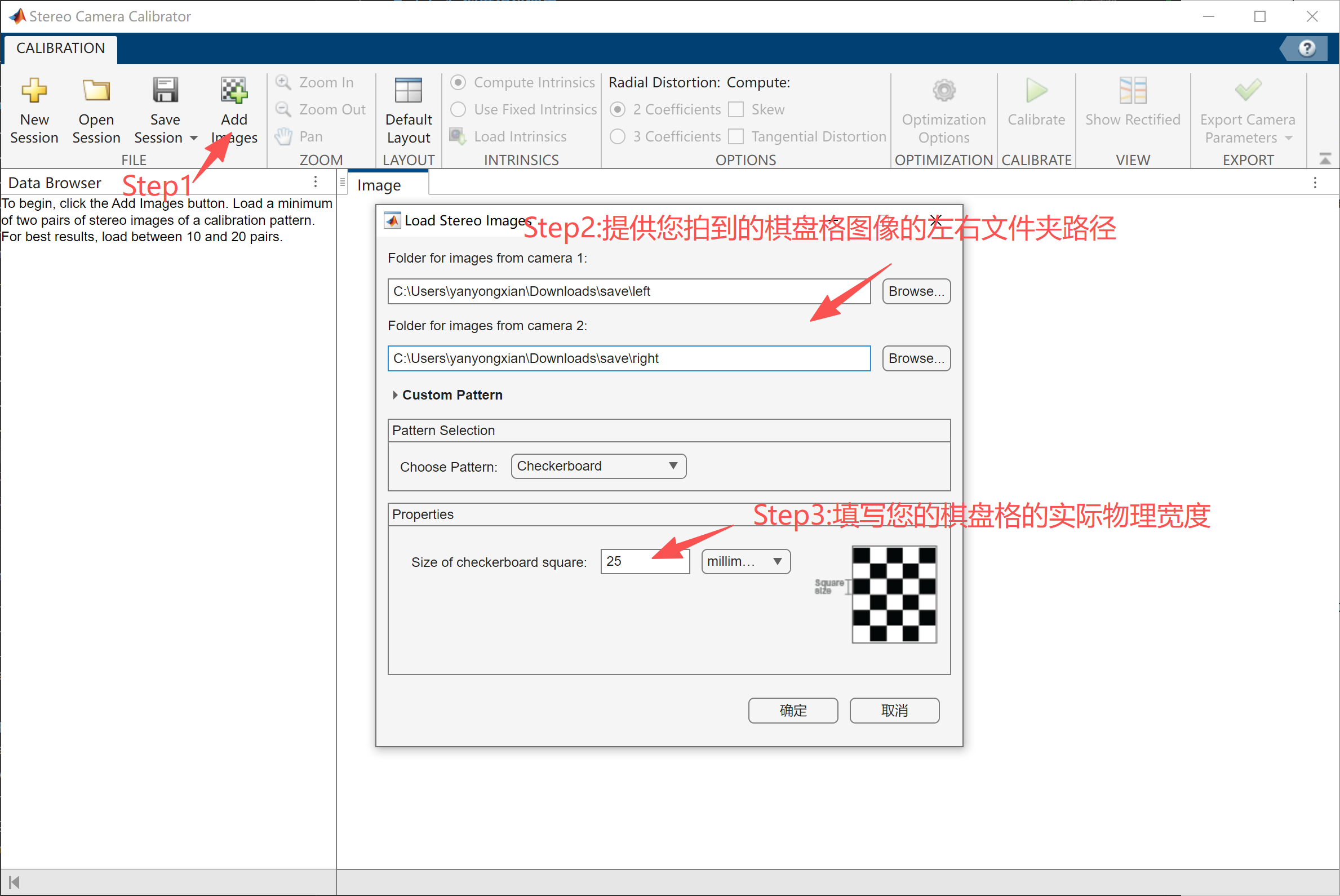
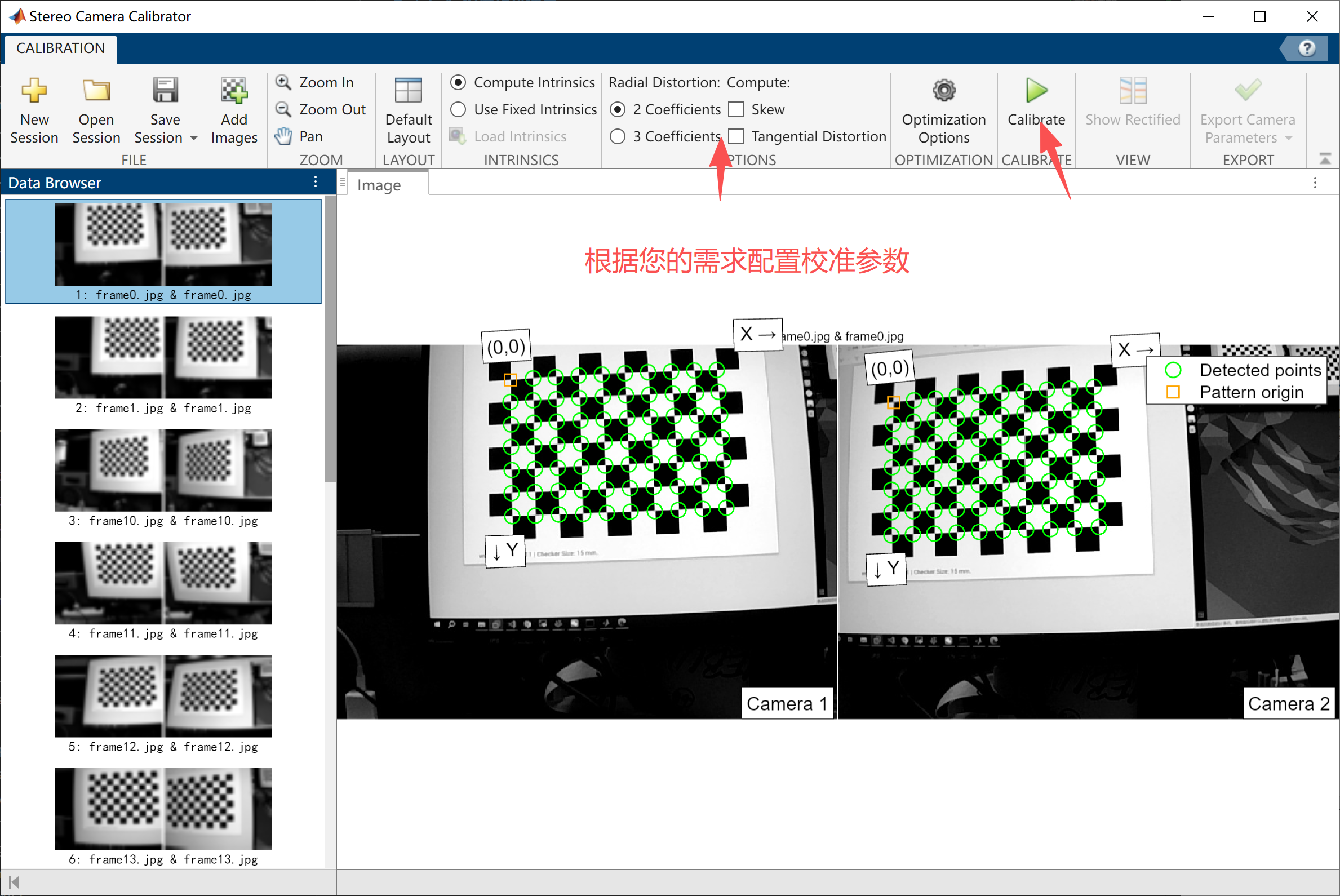
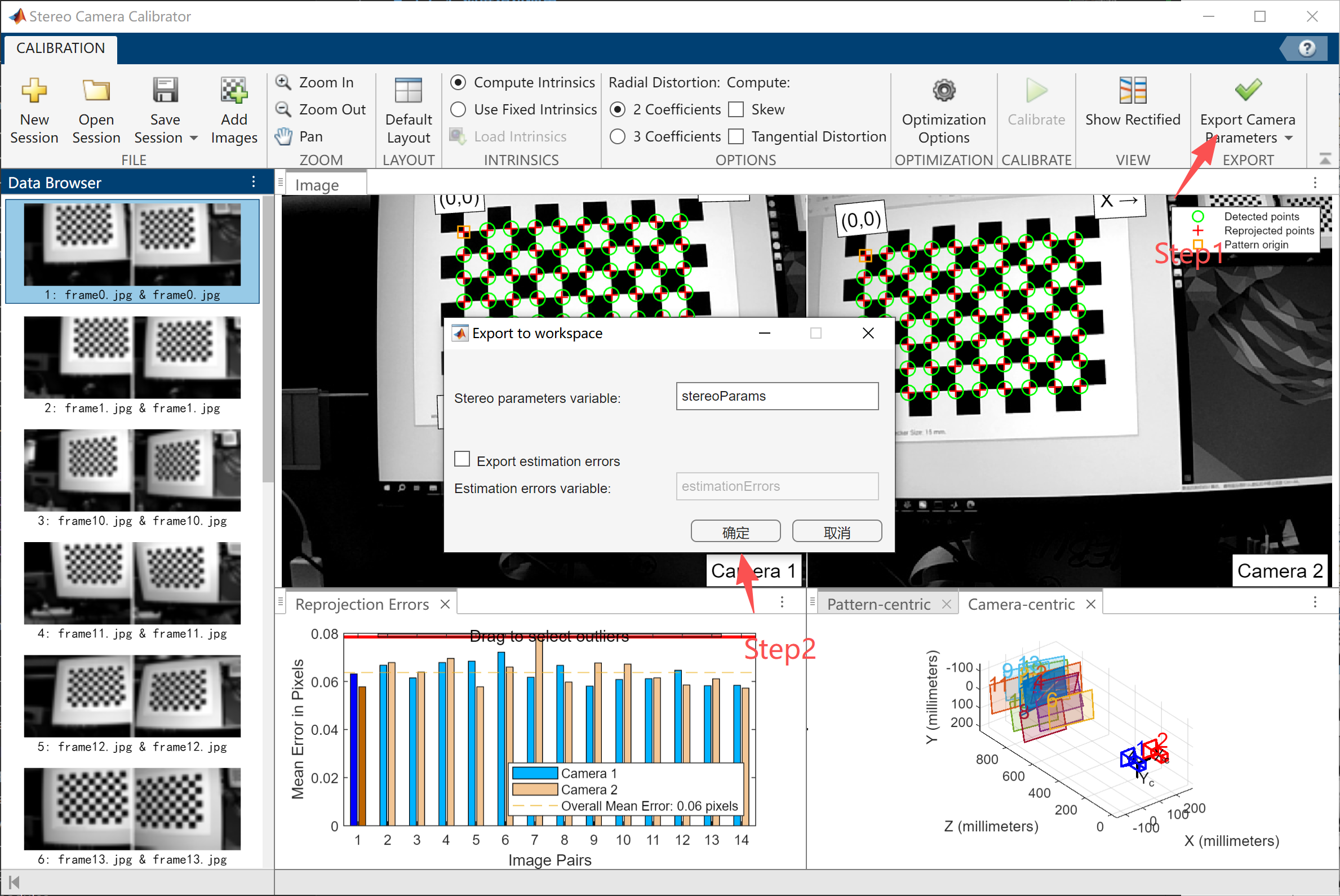
注意: 误差必须控制在 0.1 以内。
-
导出标定文件
% 提取左右相机的内参矩阵
K1 = stereoParams.CameraParameters1.IntrinsicMatrix';
K2 = stereoParams.CameraParameters2.IntrinsicMatrix';
% 提取左右相机的畸变系数
D1 = stereoParams.CameraParameters1.RadialDistortion;
D1 = [D1, stereoParams.CameraParameters1.TangentialDistortion];
D2 = stereoParams.CameraParameters2.RadialDistortion;
D2 = [D2, stereoParams.CameraParameters2.TangentialDistortion];
% 提取旋转矩阵和平移向量
R = stereoParams.RotationOfCamera2;
T = stereoParams.TranslationOfCamera2';
% 创建 YAML 文件内容
yaml_content = sprintf('Camera1:\n');
yaml_content = [yaml_content, sprintf(' K: [%f, %f, %f, %f, %f, %f, %f, %f, %f] \n', K1(:))];
yaml_content = [yaml_content, sprintf(' D: [%f, %f, %f, %f] \n', D1)];
yaml_content = [yaml_content, sprintf('Camera2:\n')];
yaml_content = [yaml_content, sprintf(' K: [%f, %f, %f, %f, %f, %f, %f, %f, %f]\n', K2(:))];
yaml_content = [yaml_content, sprintf(' D: [%f, %f, %f, %f] \n\r', D2)];
yaml_content = [yaml_content, sprintf('R: [%f, %f, %f, %f, %f, %f, %f, %f, %f]\n', R(:))];
yaml_content = [yaml_content, sprintf('T: [%f, %f, %f] \n', T)];
% 写入文件
fid = fopen('stereo_params.yaml', 'w');
fprintf(fid, yaml_content);
fclose(fid);
disp('YAML 文件已生成: stereo_params.yaml');
-
OpenCV 中读取标定文件并进行双目配对
安装环境:
sudo apt update
sudo apt install libyaml-cpp-dev
CMakeLists.txt:
# ------------------------
# CMakeLists.txt
# put the file in the project root directory
# ~/project/CMakeLists.txt
# ------------------------
cmake_minimum_required(VERSION 3.10)
project(stereo_test)
set(CMAKE_CXX_STANDARD 11)
set(CMAKE_CXX_STANDARD_REQUIRED ON)
set(CMAKE_BUILD_TYPE Release)
find_package(OpenCV REQUIRED)
include_directories(${OpenCV_INCLUDE_DIRS})
add_executable(stereo_test main.cpp)
target_link_libraries(stereo_test ${OpenCV_LIBS} yaml-cpp)
示例 C++ 代码: main.cpp:
// ------------------------
// main.cpp
// put the file in the project root directory
// ~/project/main.cpp
// ------------------------
#include <yaml-cpp/yaml.h>
#include <chrono>
#include <csignal>
#include <atomic>
#include <chrono>
#include <thread>
#include <opencv2/opencv.hpp>
std::atomic<bool> running(true);
void signal_handler(int signum) {
std::cout << "\nCaught signal " << signum << ", exiting...\n";
running = false; // 设置标志,退出 while 循环
}
void readYaml(const std::string& filename, cv::Mat &K1, cv::Mat &D1, cv::Mat &K2, cv::Mat &D2, cv::Mat &R, cv::Mat &T) {
try {
YAML::Node config = YAML::LoadFile(filename);
// 读取 Camera1 的参数
std::vector<double> K1_vec = config["Camera1"]["K"].as<std::vector<double>>();
std::vector<double> D1_vec = config["Camera1"]["D"].as<std::vector<double>>();
// 读取 Camera2 的参数
std::vector<double> K2_vec = config["Camera2"]["K"].as<std::vector<double>>();
std::vector<double> D2_vec = config["Camera2"]["D"].as<std::vector<double>>();
// 读取旋转矩阵 R 和平移向量 T
std::vector<double> R_vec = config["R"].as<std::vector<double>>();
std::vector<double> T_vec = config["T"].as<std::vector<double>>();
K1 = cv::Mat(3, 3, CV_64F);
D1 = cv::Mat(1, 4, CV_64F);
K2 = cv::Mat(3, 3, CV_64F);
D2 = cv::Mat(1, 4, CV_64F);
R = cv::Mat(3, 3, CV_64F);
T = cv::Mat(3, 1, CV_64F);
for (int i = 0; i < 9; i++) {
K1.at<double>(i / 3, i % 3) = K1_vec[i];
}
for (int i = 0; i < 4; i++) {
D1.at<double>(0, i) = D1_vec[i];
}
for (int i = 0; i < 9; i++) {
K2.at<double>(i / 3, i % 3) = K2_vec[i];
}
for (int i = 0; i < 4; i++) {
D2.at<double>(0, i) = D2_vec[i];
}
for (int i = 0; i < 9; i++) {
R.at<double>(i / 3, i % 3) = R_vec[i];
}
for (int i = 0; i < 3; i++) {
T.at<double>(i, 0) = T_vec[i];
}
K1 = K1.t();
K2 = K2.t();
} catch (const YAML::Exception& e) {
std::cerr << "Error reading YAML file: " << e.what() << std::endl;
}
}
int main(int argc, char **argv){
signal(SIGINT, signal_handler);
cv::Mat K1, D1, K2, D2, R, T;
readYaml(argv[1], K1, D1, K2, D2, R, T);
std::cout << "K1: " << K1 << std::endl;
std::cout << "D1: " << D1 << std::endl;
std::cout << "K2: " << K2 << std::endl;
std::cout << "D2: " << D2 << std::endl;
std::cout << "R: " << R << std::endl;
std::cout << "T: " << T << std::endl;
T /= 1000.0; // 单位转换
cv::Mat R1, R2, P1, P2, Q;
cv::stereoRectify(K1, D1, K2, D2, cv::Size(640, 480), R, T, R1, R2, P1, P2, Q, cv::CALIB_ZERO_DISPARITY,0, cv::Size(640, 480));
cv::Mat map1x, map1y;
cv::initUndistortRectifyMap(K1, D1, R1, P1, cv::Size(640, 480), CV_16SC2, map1x, map1y);
cv::Mat map2x, map2y;
cv::initUndistortRectifyMap(K2, D2, R2, P2, cv::Size(640, 480), CV_16SC2, map2x, map2y);
cv::Ptr<cv::StereoSGBM> sgbm = cv::StereoSGBM::create(
0, 64, 1, 10, 150, 0, 3, 22, 3, 3, cv::StereoSGBM::MODE_SGBM_3WAY);
int video_idx = std::stoi(argv[2]);
std::string gst_pipeline = "v4l2src device=/dev/video" + std::to_string(video_idx) + " io-mode=2 ! " +
"video/x-raw,format=YUY2,width=1280,height=480,framerate=100/1 ! " +
"videoconvert ! " +
"video/x-raw, format=BGR ! " +
"appsink";
cv::VideoCapture cap(gst_pipeline, cv::CAP_GSTREAMER);
if (!cap.isOpened()) {
std::cerr << "Failed to open camera" << std::endl;
return -1;
}
auto save_vid = cv::VideoWriter("output.avi", cv::VideoWriter::fourcc('M', 'J', 'P', 'G'), 30, cv::Size(1280, 480));
while(running && cap.grab()){
cv::Mat frame;
cap.retrieve(frame);
cv::Mat left, right;
left = frame.colRange(0, frame.cols / 2).clone();
right = frame.colRange(frame.cols / 2, frame.cols).clone();
cv::remap(left, left, map1x, map1y, cv::INTER_LINEAR);
cv::remap(right, right, map2x, map2y, cv::INTER_LINEAR);
cv::Mat disp;
sgbm->compute(left, right, disp);
//disp = disp / 16.0 * 4
// disp.convertTo(disp, CV_16UC1);
cv::Mat disp_invalid;
disp_invalid = disp < 0;
disp.convertTo(disp, CV_8U, 1.0 / 4, 0);
cv::applyColorMap(disp, disp, cv::COLORMAP_JET);
disp.setTo(0, disp_invalid);
cv::Mat total;
cv::hconcat(left, disp, total);
save_vid.write(total);
}
save_vid.release();
cap.release();
return 0;
}
cd ~/project
#put the param.yaml in ~/project/
mkdir build && cd build
cmake ..
make
./stereo_test ~/project/param.yaml 20
-
效果图
