CMP10A IMU 使用
硬件连接
硬件资料:(https://item.jd.com/10052180610725.html)、(https://www.yahboom.com/study/IMU)
硬件连接示意:

查看设备节点:
bianbu@bianbu:~$ ls /dev/ttyUSB*
/dev/ttyUSB0
赋予设备节点权限
sudo chmod 666 /dev/ttyUSB0
环境准备
安装依赖
确保开发环境依赖已安装:(https://bianbu.spacemit.com/brdk/system_configuration/2.3_System_Dependency_Installation)
sudo apt install python3-serial ros-humble-rviz2 ros-humble-rviz-imu-plugin
导入 ROS2 环境
之后的步骤默认已导入
source /opt/bros/humble/setup.bash
启动 IMU 节点
发布 TF
ros2 launch rdk_sensors wit_imu_rviz.launch.py port:=/dev/ttyUSB0
这会发布imu的数据,同时发布一个 base_link 到 imu_link 的 TF 变换,方便使用 rviz2 进行可视化。
不发布 TF
ros2 launch rdk_sensors wit_imu.launch.py port:=/dev/ttyUSB0
只发布 imu 的数据,适合与其他 ROS2 包集成时使用。
启动可视化
export QT_QPA_PLATFORM=xcb # Humble版本使用
ros2 launch rdk_visualization display_imu.launch.py
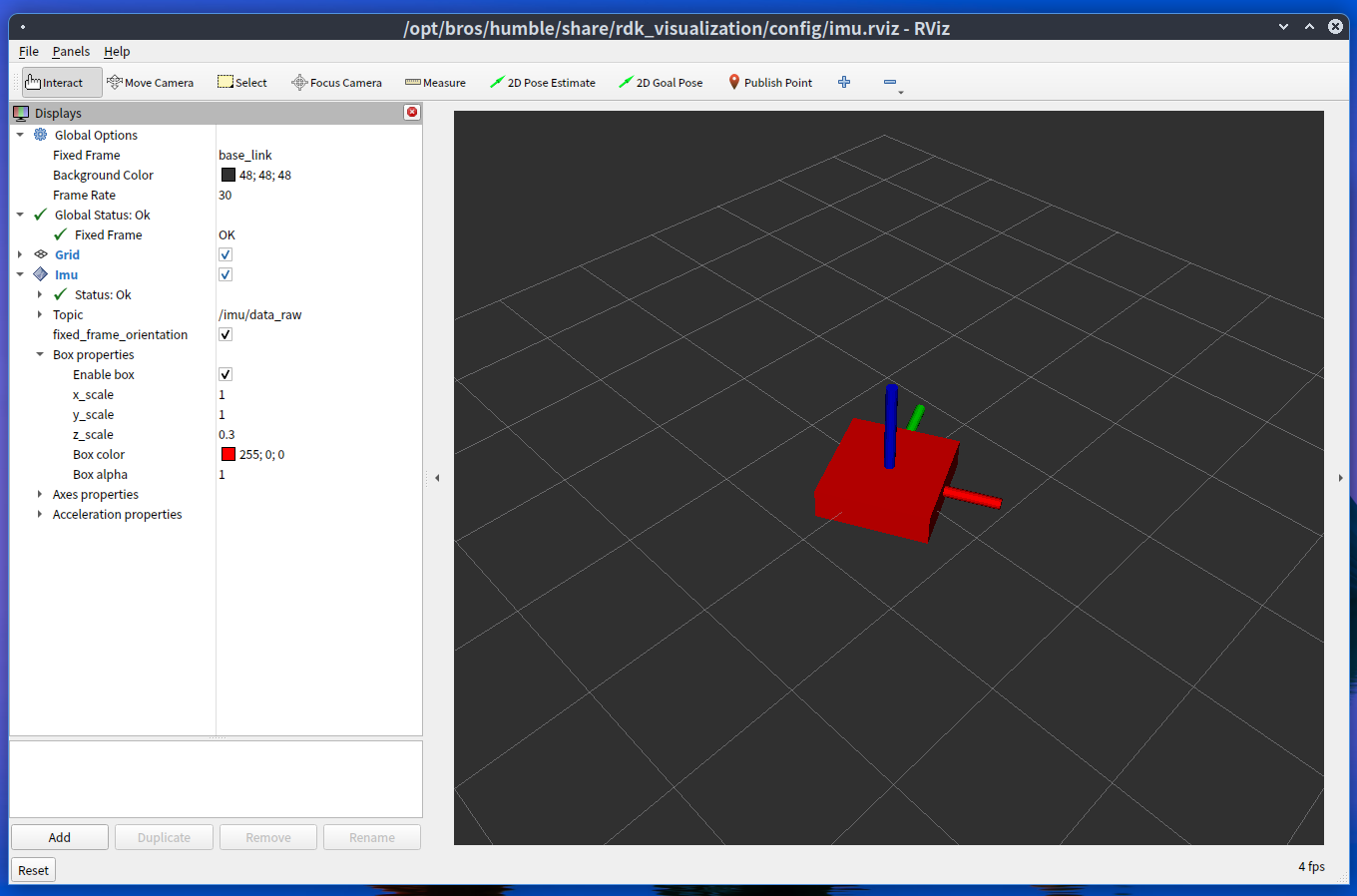
晃动 imu,红色小方块的位姿也会随之变化