小车跟随及语音交互
案例简介
本案例展示了 K1 平台驱动 AGV 小车完成多模态交互与自主移动的能力。系统通过深度集成 ROS2 框架。采用 Function Call 技术架构,支持用户通过自然语音指令与 AGV 小车进行实时交互,构建了智能化的人机协作系统。该解决方案充分融合了环境感知、运动控制和语音交互等关键技术,展现了家庭服务和工业级 AGV 的智能化应用前景。
硬件清单
- 基于 K1 芯片的开发板一块,建议使用 Muse Pi Pro
- 轮趣教育版 ROS2 麦轮小车一辆
- USB 单目相机一个
- 环形麦克风(科大讯飞联名远场麦克风阵列六麦M260C板语音交互模块)
- USB 扬声器一个
- YDLIDAR X3 Pro 激光雷达(选配)
硬件连接图
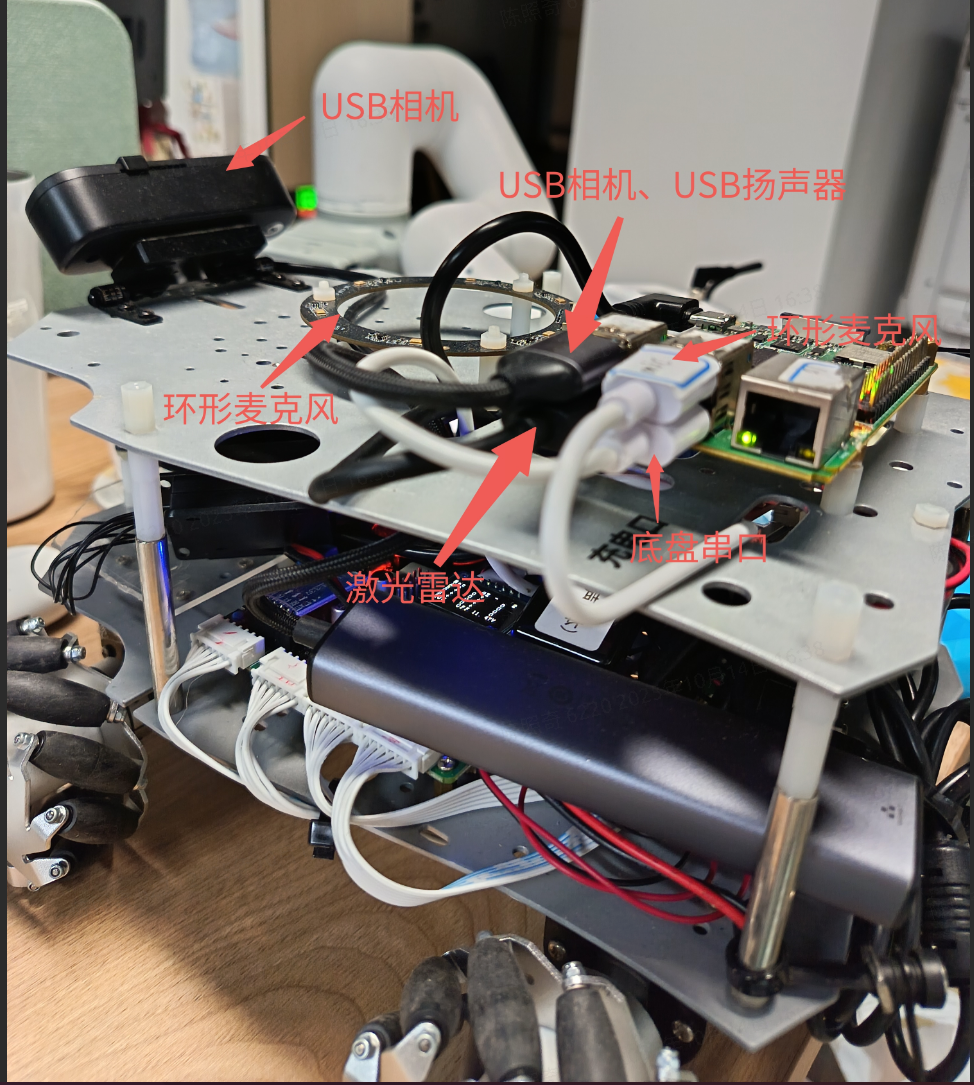
激光雷达在本案例中未使用。
俯视图
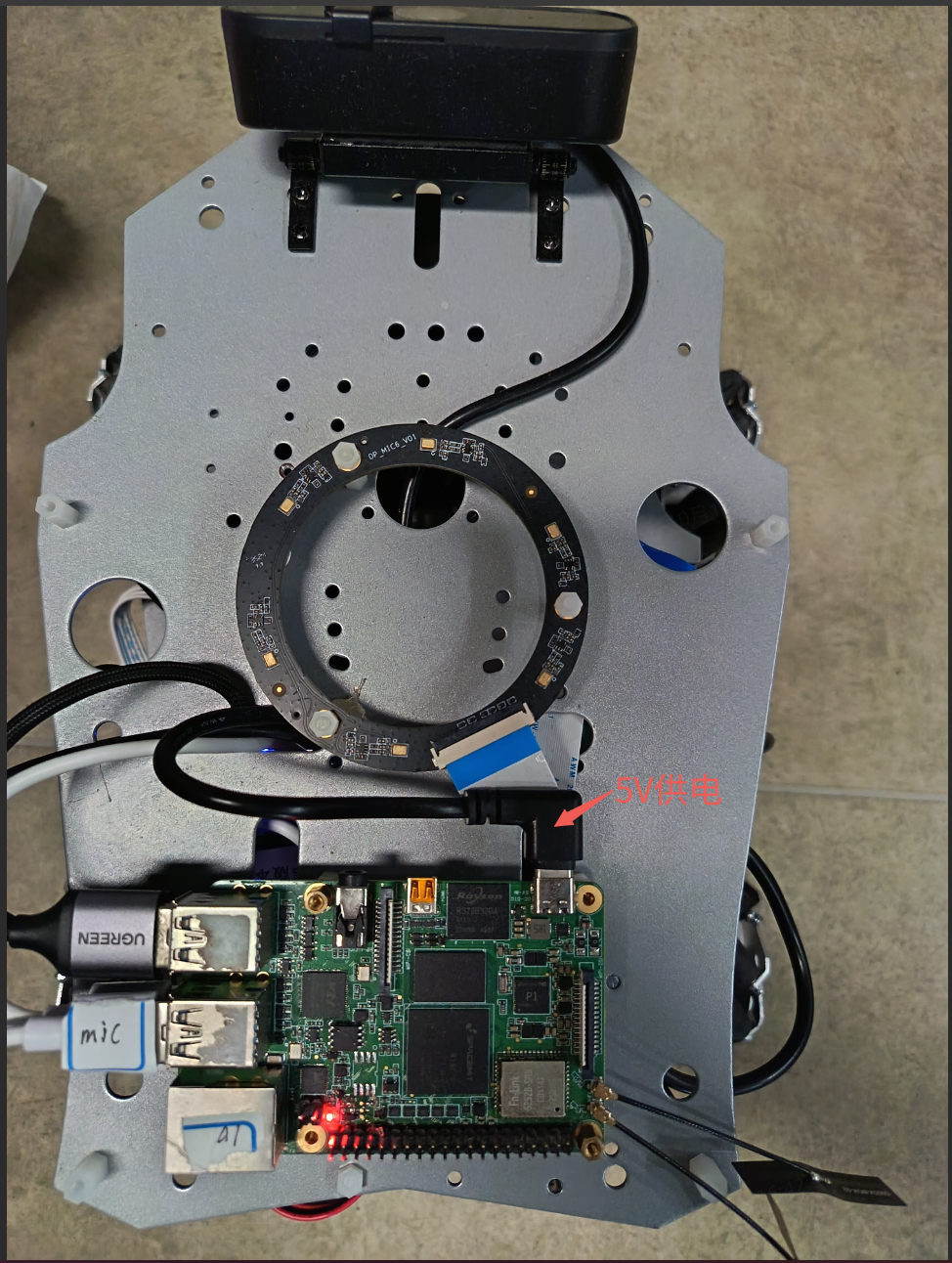
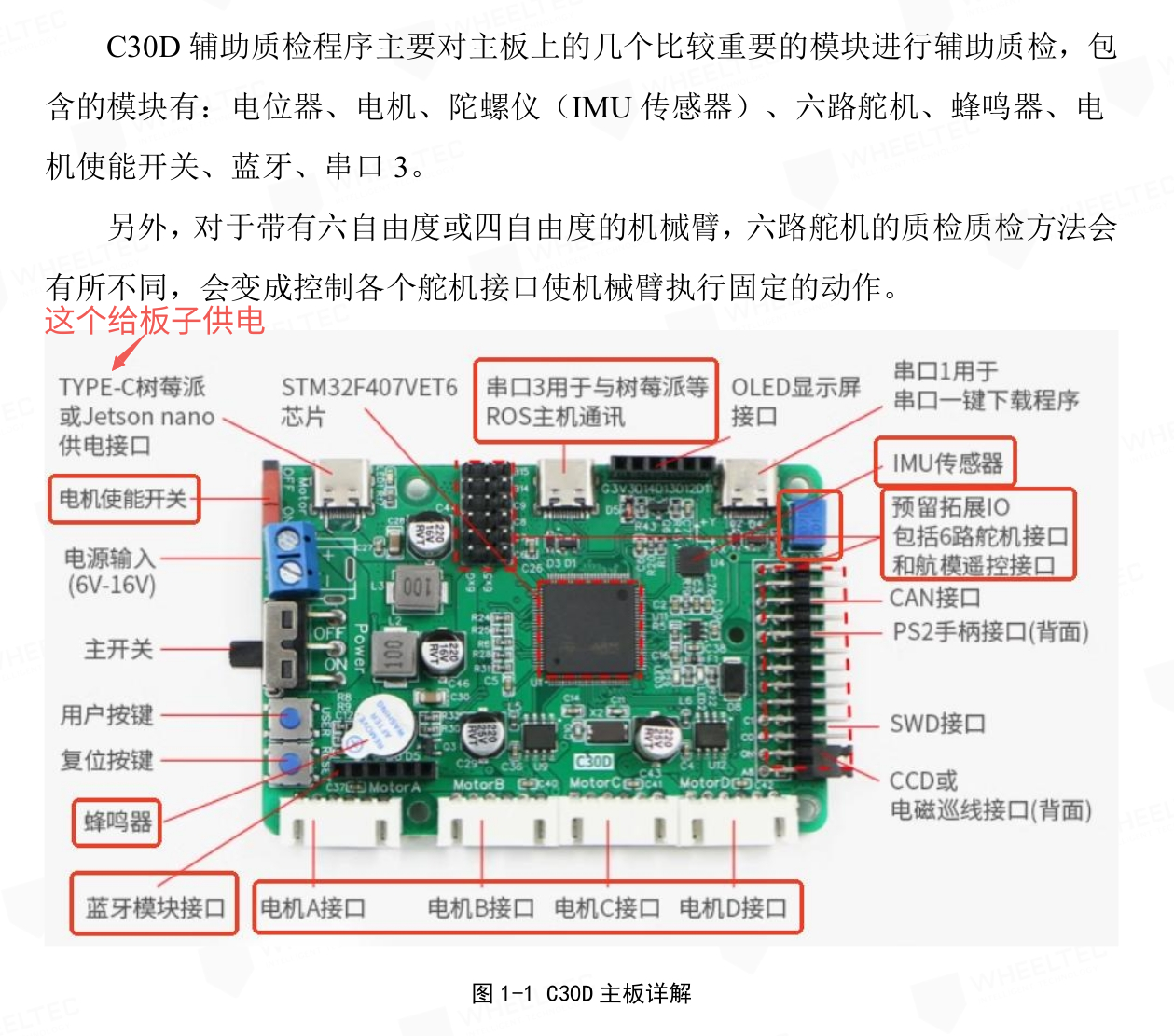
供电使用底板单片机的5V供电输出,见:
案例框架和控制流程
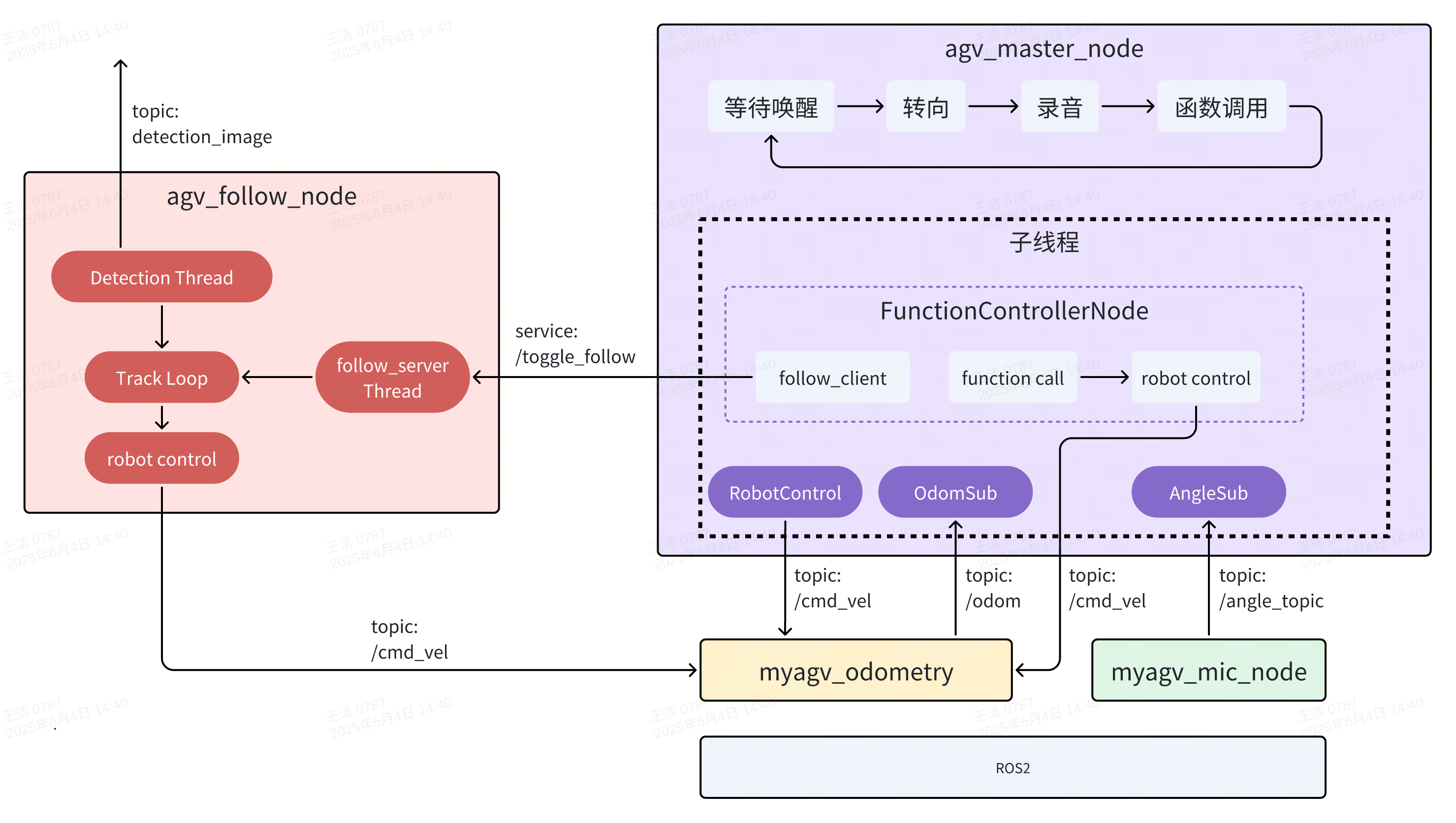
上图展示了 AGV 小车跟随案例在 ROS2 系统中的整体框架与流程控制,主要由以下四个节点组成:
1)agv_master_node:主控节点,负责整体流程控制。
- 监听
/angle_topic话题获取是否唤醒和唤醒角度信息; - 发送
/cmd_vel话题控制小车转向目标角度; - 调用
spacemit_audio/record.py执行录音,根据录音执行函数调用(由 FunctionControllerNode 节点管理); - 根据语音结果决定是否启动跟随(通过服务
/toggle_follow触发); - 其它控制指令直接通过
/cmd_vel发布。
2)agv_follow_node:视觉跟随节点,实现对目标行人的跟踪控制。
- 视觉线程检测图像中最接近中心的人,发布
/detection_image话题给主线程; - 主线程根据监测信息计算并发布
/cmd_vel控制速度; - 服务线程监听
/toggle_follow服务来控制是否启用跟随。
3)myagv_mic_node:麦克风节点,进行声源定位和语音唤醒。
- 进行声源检测,发布
/angle_topic(包含角度 + 是否唤醒)。
4)myagv_odometry:底盘节点,提供小车位置(/odom)和接受控制(/cmd_vel)。
- 根据
/cmd_vel控制小车移动; - 发布
/odom供主控节点判断方向; - 可替换为真实或仿真底盘控制模块。
环境搭建
建议使用 ROS2_LXQT 系统
安装系统依赖
sudo apt install ros-dev-tools ros-humble-ros-base \
python3-numpy 'ros-humble-cartographer*' 'ros-humble-nav*' libpcap0.8-dev libuvc-dev \
ros-humble-filters ros-humble-turtlesim ros-humble-camera-info-manager ros-humble-pcl-ros \
ros-humble-image-common ros-humble-image-geometry ros-humble-robot-localization \
ros-humble-joint-state-publisher \
ros-humble-tf-transformations \
libopenblas-dev \
portaudio19-dev \
python3-dev python3-venv python3-pip \
ffmpeg \
python3-spacemit-ort \
libcjson-dev \
libasound2-dev \
python3-pyaudio python3-soundfile python3-jieba
sudo apt install python3-opencv ros-humble-cv-bridge ros-humble-camera-info-manager \
ros-humble-image-transport python3-spacemit-ort python3-yaml libyaml-dev python3-numpy
配置雷达包
git clone https://github.com/YDLIDAR/YDLidar-SDK.git
cd YDLidar-SDK
mkdir build && cd build
cmake ..
cmake --build . -- -j8
sudo cmake --install .
构建小车的 ROS 包
mkdir -p ~/agv_mec_ws/src
cd ~/agv_mec_ws/src
wget https://archive.spacemit.com/ros2/code/agv_ai_pipeline/agv_mec.tar.gz
tar xzvf agv_mec.tar.gz
cd ~/agv_mec_ws/
colcon build
配置 udev
1)配置udev规则将硬件设备映射到系统设备索引
sudo su
小车底盘
echo 'KERNEL=="ttyACM*", ATTRS{serial}=="0002", ATTRS{idVendor}=="1a86", ATTRS{idProduct}=="55d4", MODE:="0777",SYMLINK+="wheeltec_controller"' >/etc/udev/rules.d/wheeltec_base.rules
环形麦克风
echo 'KERNEL=="ttyACM*", ATTRS{serial}=="0004", ATTRS{idVendor}=="1a86", ATTRS{idProduct}=="55d4", MODE:="0777",SYMLINK+="wheeltec_mic"' >/etc/udev/rules.d/wheeltec_mic.rules
雷达
echo 'KERNEL=="ttyUSB*", ATTRS{idVendor}=="10c4", ATTRS{idProduct}=="ea60", MODE:="0777",SYMLINK+="lidar"' > /etc/udev/rules.d/wheeltec_lidar2.rules
exit
2)使设置生效
sudo udevadm control --reload-rules
sudo udevadm trigger
安装 Python 依赖
下载源码
cd ~
wget https://archive.spacemit.com/ros2/code/agv_ai_pipeline/agv-ai-pipeline.tar.gz
tar xzvf agv-ai-pipeline.tar.gz
1)配置 pip 源为进迭时空镜像源
pip config set global.index-url https://mirrors.aliyun.com/pypi/simple/
pip config set global.extra-index-url https://git.spacemit.com/api/v4/projects/33/packages/pypi/simple
2)创建 Python 虚拟环境
python3 -m venv ~/ai-env
3)安装 Python 依赖
source ~/ai-env/bin/activate
pip install pip -U
pip install -r ~/agv-ai-pipeline/spacemit_audio/requirements.txt
启动程序
启动底盘
1)获取 ROS 环境
source ~/agv_mec_ws/install/setup.bash
2)启动底盘控制系统
ros2 launch turn_on_wheeltec_robot turn_on_robot_no_lidar.launch.py
3)启动语音唤醒服务
ros2 run jobot_mic myagv_mic_node
启动跟随节点
在 SpacemiT RISC-V 板子上启动 人体跟随算法,启动前请确保 USB 相机已经接入。
小车跟随策略是选择距离中心最近的目标,直到跟随到较近的距离后停止,线速度默认 0.1 m/s,角速度默认 0.37 rad/s,可以通过 launch 文件参数配置。
设备号可以如下查看:
➜ ~ ls /dev/video*
/dev/video0 /dev/video10 /dev/video12 /dev/video14 /dev/video16 /dev/video18 /dev/video2 /dev/video21 /dev/video4 /dev/video50 /dev/video6 /dev/video8 /dev/video-dec0
/dev/video1 /dev/video11 /dev/video13 /dev/video15 /dev/video17 /dev/video19 /dev/video20 /dev/video3 /dev/video5 /dev/video51 /dev/video7 /dev/video9
反复插拔一下即可确认设备号,程序内默认的设备号是 /dev/video20
确认导入环境,ROS2_LXQT 默认导入
# 导入 bros 环境, ros2 环境被随之导入
source /opt/bros/humble/setup.bash
启动相机节点
ros2 launch rdk_sensors usb_cam.launch.py video_device:="/dev/video20"
启动跟随节点
ros2 launch rdk_application agv_person_follow.launch.py
输出如下:
[INFO] [launch]: All log files can be found below /home/zq-pi/.ros/log/2025-06-12-16-07-34-737169-spacemit-k1-x-MUSE-Pi-board-89537
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [agv_follow_node-1]: process started with pid [89544]
[agv_follow_node-1] [INFO] [1749715663.222242636] [agv_follow_node]: AI 跟踪控制服务已启动, 当前状态为暂停
为了适应多任务处理的场景,跟随节点启动了一个可以控制是否跟随的服务。
你可以在终端快速开启该服务:
source /opt/bros/humble/setup.bash
ros2 service call /toggle_follow std_srvs/srv/SetBool "{data: true}"
跟踪节点会打印:
[agv_follow_node-1] [INFO] [1749715842.691932191] [agv_follow_node]: 收到请求: data=True -> AI 跟踪模块已开启
关闭服务可以使用:
ros2 service call /toggle_follow std_srvs/srv/SetBool "{data: false}"
启动 Python 节点
1)获取 ROS 环境
source ~/agv_mec_ws/install/setup.bash
2)激活 Python 虚拟环境
source ~/ai-env/bin/activate
export PYTHONPATH=~/ai-env/lib/python3.12/site-packages/:$PYTHONPATH
3)启动AI pipeline节点
cd ~/agv-ai-pipeline
python agv_master_node.py
交互方式
-
唤醒词:小微小微 每次唤醒时,小车会先停止当前运动,然后旋转到用户方向,随后开始录音,录音的最大时长 5 秒。
-
提示词:跟我走、�停止跟随、原地旋转、向前走、向后走、向前走两步、向后走两步、向左转、向右转