Realsense L515 深度相机使用
硬件环境
SpaceMIT RISCV64 开发板,已在 MUSE PI PRO 开发板上验证
inter 官方已经停止对 L515 的支持,建议使用 D4xx 系列。
建议的操作系统
ROS2_LXQT(推荐),镜像链接
Bianbu 2.2 Desktop,镜像链接
SDK 版本说明
只可使用 v2.54.2 版本 SDK
我们发布的 SDK 基于官方发布版本修改并构建,官方 SDK 源码发布参考:https://github.com/realsenseai/librealsense/releases
更换内核
下载内核包:
wget https://archive.spacemit.com/ros2/prebuilt_libs/bianbu24/kernel_image/linux-image-6.6.63_6.6.63-20251217101945_riscv64.deb
安装内核包
sudo apt update
sudo apt install ./linux-image-6.6.63_6.6.63-20251217101945_riscv64.deb
等待安装完成,执行:
sudo reboot
下载并使用 SDK
下载前请不要连接任何 Realsense 设备到板子上。
获取下载脚本
wget https://archive.spacemit.com/ros2/prebuilt_libs/install_scripts_common/install_librealsense.sh
指定版本下载
bash install_librealsense.sh 2.54.2
终端输出:
bianbu@bianbu:~$ bash install_librealsense.sh 2.54.2
准备安装 librealsense 2.54.2
版本说明: 高版本,支持 D4xx系列相机, 已经过测试。具体见: https://dev.intelrealsense.com/docs/firmware-updates
当前系统 Python 版本: 3.12 (使用目录: bianbu24)
更新 apt 源并安装依赖...
[sudo] bianbu 的密码:
输入密码,默认是 bianbu
等待依赖安装完成,终端提示:
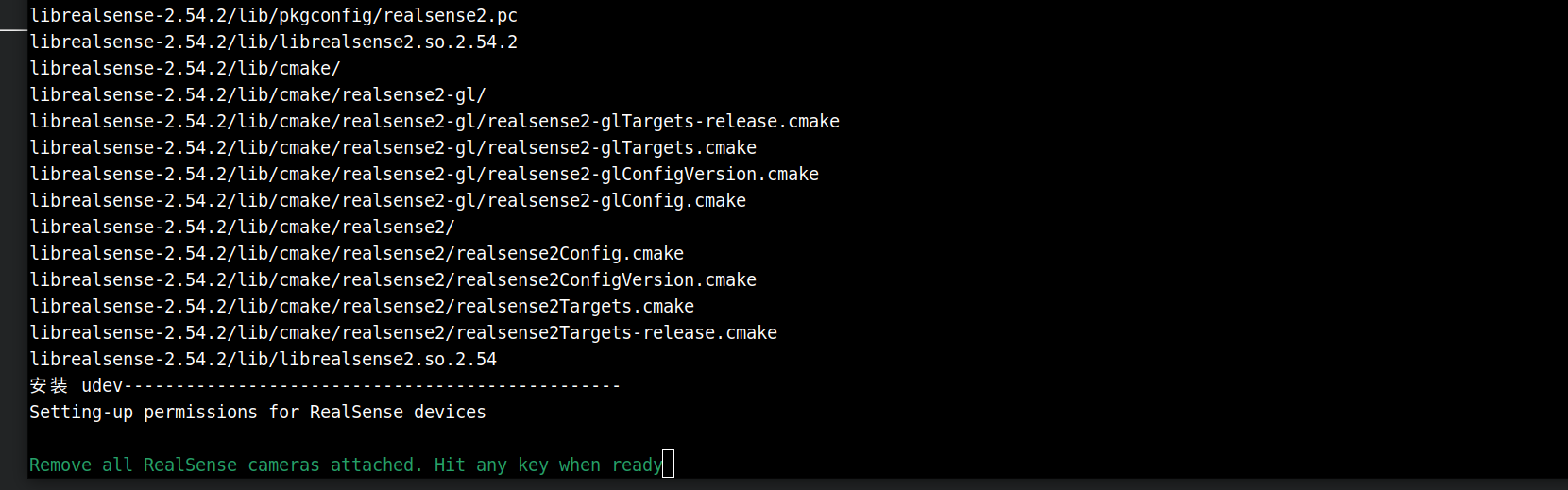
注意,确认当前板子没有连接 Realsense 相机后,按下回车键继续。
安装成功后,终端输出如下:
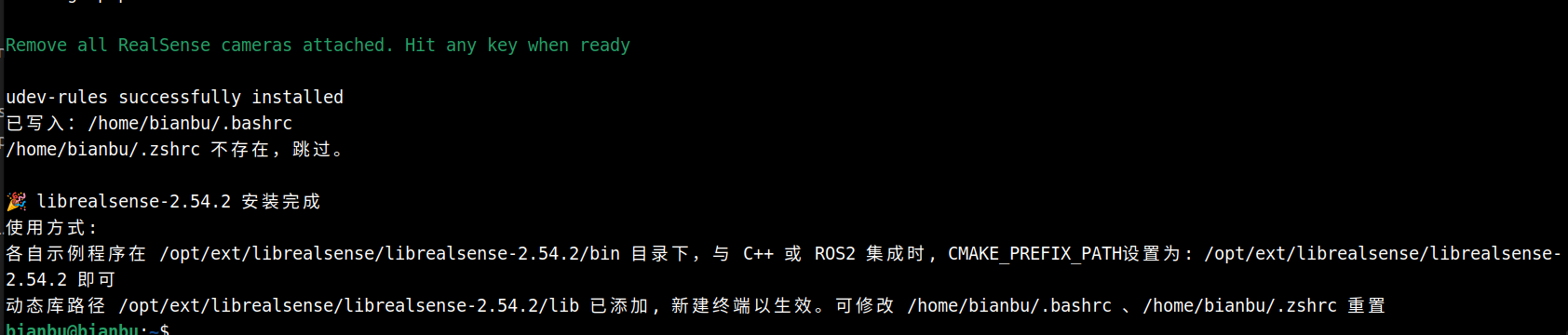
新建终端让 LD_LIBRARY_PATH 环境变量生效。
注意不要在一台机器上安装多个版本 SDK ,以免互相干扰。
硬件连接
安装完 SDK 后即可以接入 Realsense L515 相机,如下:
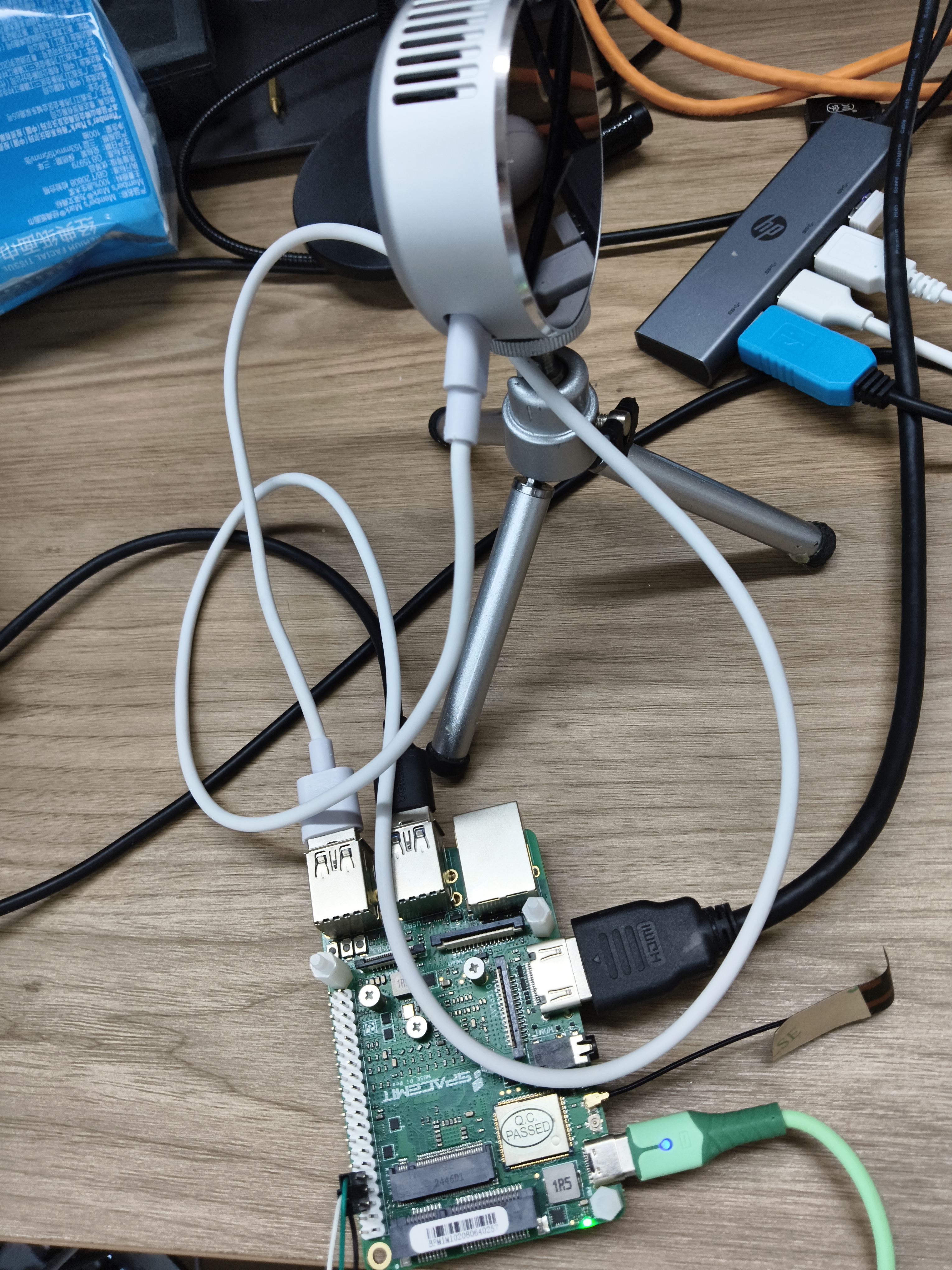
这里使用的是 L515 相机
终端输入 lsusb 查看设备:
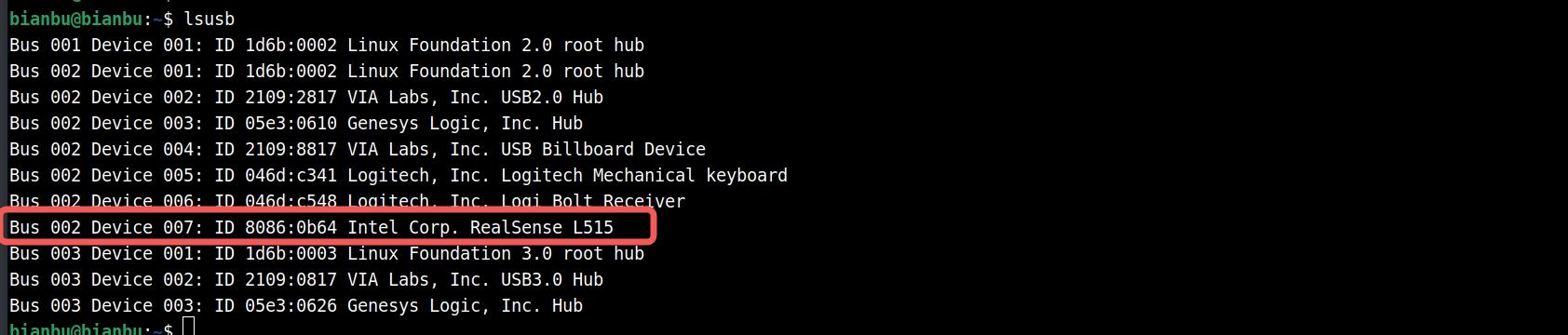
设备识别正常
运行示例
进入 /opt/ext/librealsense/librealsense-2.54.2/bin 目录
有一些可以运行的示例程序,如下:

rs-hello-realsense
简单的程序,获取相机图像中心的深度值,输出如下:

rs-capture
含界面显示,你应该在本地执行该命令,而非 ssh 终端
显示如下:
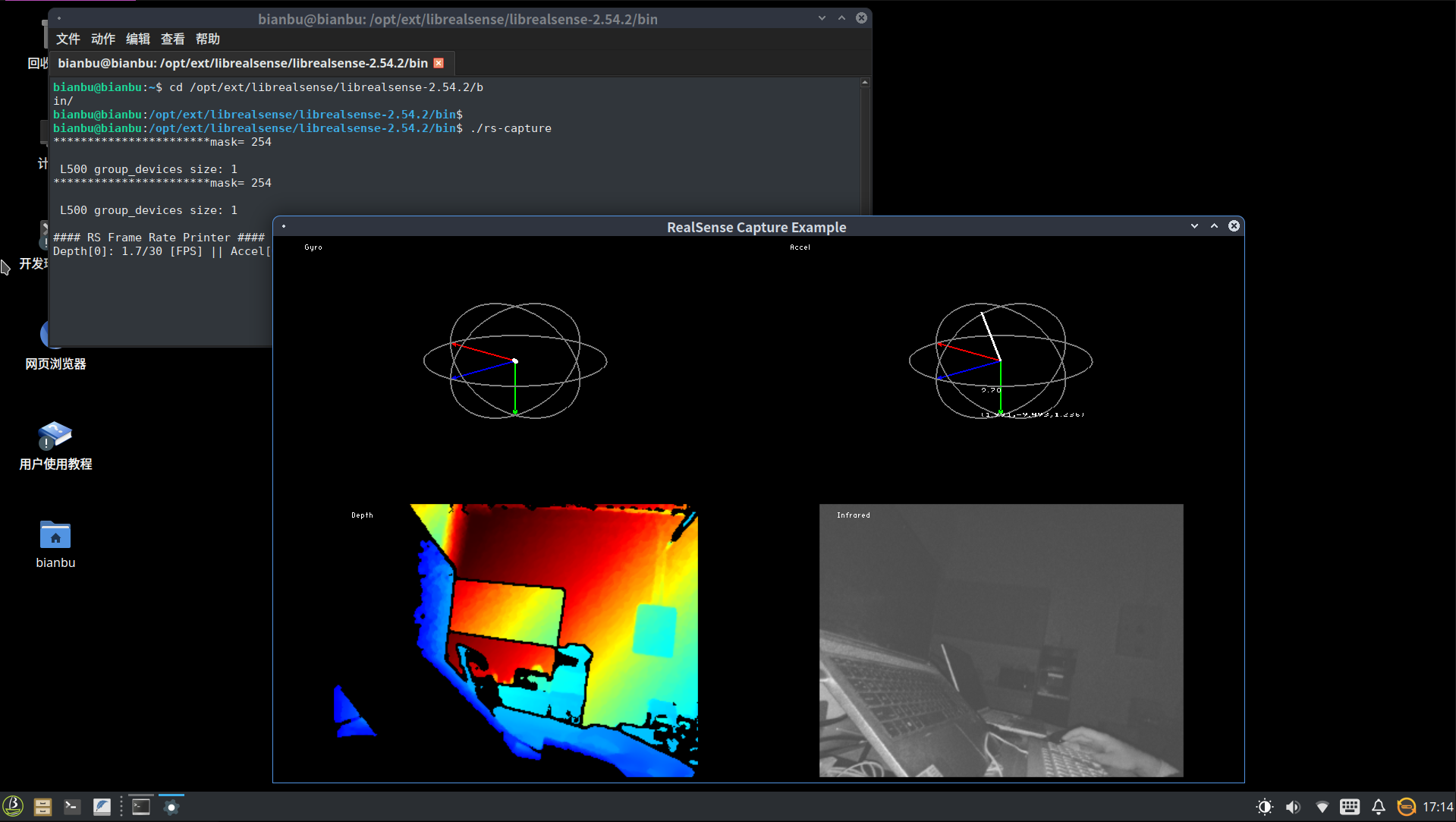
由于本地的计算资源有限,因此可视化工具只建议用于硬件通信的验证。