Realsense D4xx 系列深度相机使用
硬件环境
SpaceMIT RISCV64 开发板,已在 MUSE PI PRO 开发板上验证
已验证的相机型号
Realsense D415
建议的操作系统
ROS2_LXQT(推荐),镜像链接
Bianbu 2.2 Desktop,镜像链接
SDK 版本说明
建议下载 v2.56.4 版本 SDK
我们发布的 SDK 基于官方发布版本修改并构建,官方 SDK 源码发布参考:https://github.com/realsenseai/librealsense/releases
查看不同相机需要的 SDK 版本:https://dev.intelrealsense.com/docs/firmware-updates
下载并使用 SDK
下载前请不要连接任何 Realsense 设备到板子上。
这里以 2.56.4 版本的 SDK 为例,如果你使用其它版本的 SDK ,请替换 2.56.4 字段。
获取下载脚本
wget https://archive.spacemit.com/ros2/prebuilt_libs/install_scripts_common/install_librealsense.sh
指定版本下载
bash install_librealsense.sh 2.56.4
终端输出:
bianbu@bianbu:~$ bash install_librealsense.sh 2.56.4
准备安装 librealsense 2.56.4
版本说明: 高版本,支持 D4xx系列相机, 已经过测试。具体见: https://dev.intelrealsense.com/docs/firmware-updates
当前系统 Python 版本: 3.12 (使用目录: bianbu24)
更新 apt 源并安装依赖...
[sudo] bianbu 的密码:
输入密码,默认是 bianbu
等待依赖安装完成,终端提示:
注意,确认当前板子没有连接 Realsense 相机后,按下回车键继续。
安装成功后,终端输出如下:

新建终端让 LD_LIBRARY_PATH 环境变量生效。
注意不要在一台机器上安装多个版本 SDK ,以免互相干扰。
硬件连接
安装完 SDK 后即可以接入 Realsense 相机,如下:

这里使用的是 D415 相机
终端输入 lsusb 查看设备:
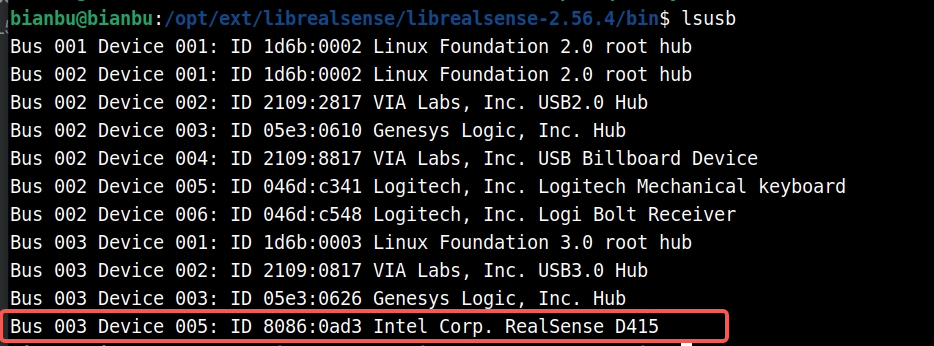
设备识别正常
运行示例
进入 /opt/ext/librealsense/librealsense-2.56.4/bin 目录
有一些可以运行的示例程序,如下:

rs-hello-realsense
简单的程序,获取相机图像中心的深度值,输出如下:

rs-capture
含界面显示,你应该在本地执行该命令,而非 ssh 终端
显示如下:
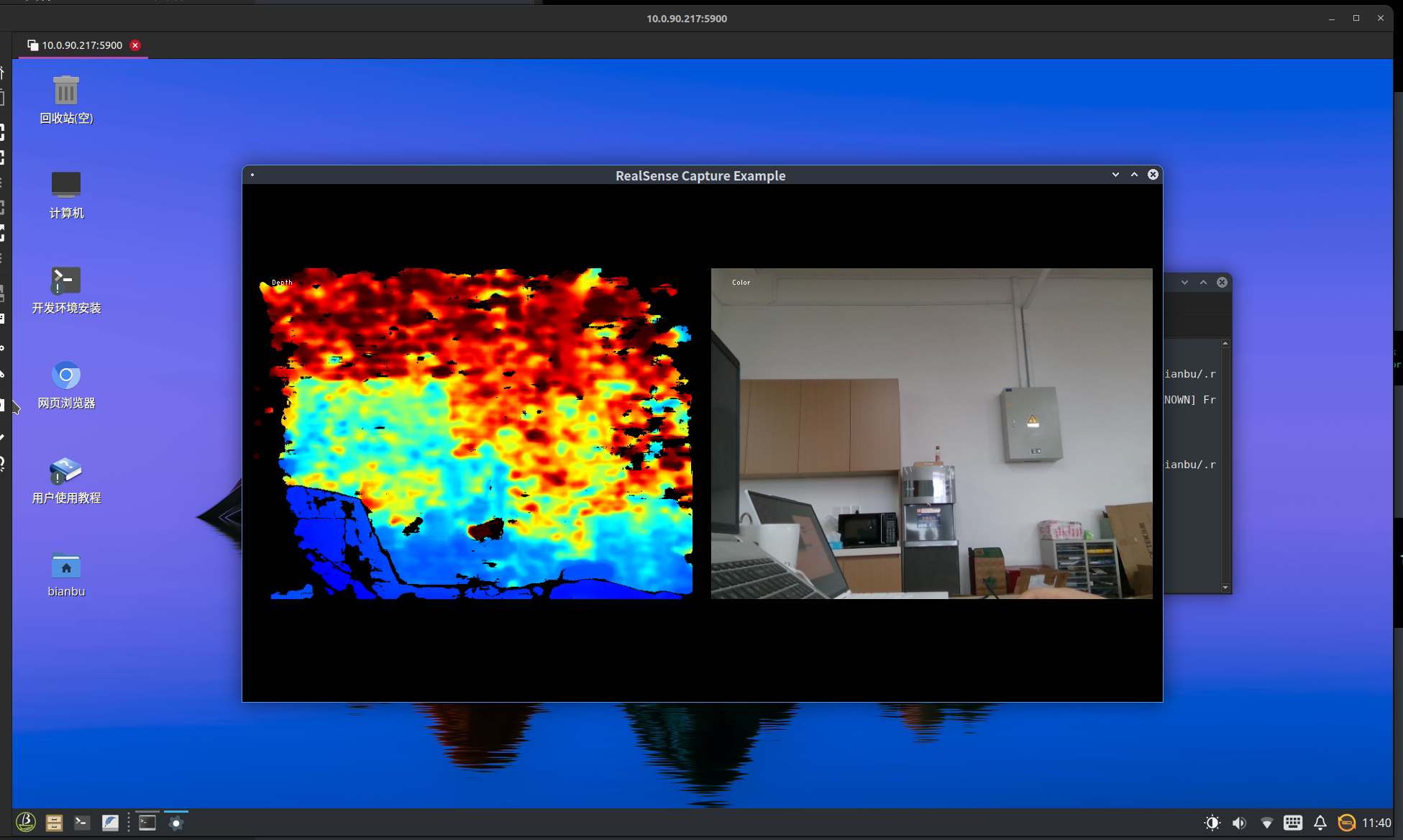
由于本地的计算资源有限,因此可视化工具只建议用于硬件通信的验证。
与 ROS2 结合
Realsense ROS2 封装依赖 Realsense SDK,请确保已完成 下载并使用 SDK 章节的操作。
软硬件环境
- 硬件环境:MUSE PI PRO
- 操作系统:ROS2_LXQT
- Realsense SDK 版本:2.56.4
- Realsense 相机型号:D415
- ROS2 版本:Humble
对于非 ROS2_LXQT 固件,请先按照官方教程安装 ROS2 Humble,安装教程
安装依赖
sudo apt install ros-humble-cv-bridge \
ros-humble-image-transport \
ros-humble-diagnostic-updater \
ros-humble-rqt-image-view \
ros-dev-tools
下载 ROS2 源码
mkdir -p ~/realsense_ws/src
cd ~/realsense_ws/src
git clone https://github.com/IntelRealSense/realsense-ros.git
cd realsense-ros && git checkout 5ef0858501a94d769381417aaafe6e0f56515292
请注意 realsense2_camera/CMakeLists.txt 文件中的 find_package(realsense2 的版本对应,提交点 5ef0858501a94d769381417aaafe6e0f56515292 对应版本 2.56
编译 ROS2 源码
cd ~/realsense_ws
source /opt/ros/humble/setup.bash
colcon build \
--cmake-args \
-DCMAKE_PREFIX_PATH=/opt/ext/librealsense/librealsense-2.56.4
运行示例
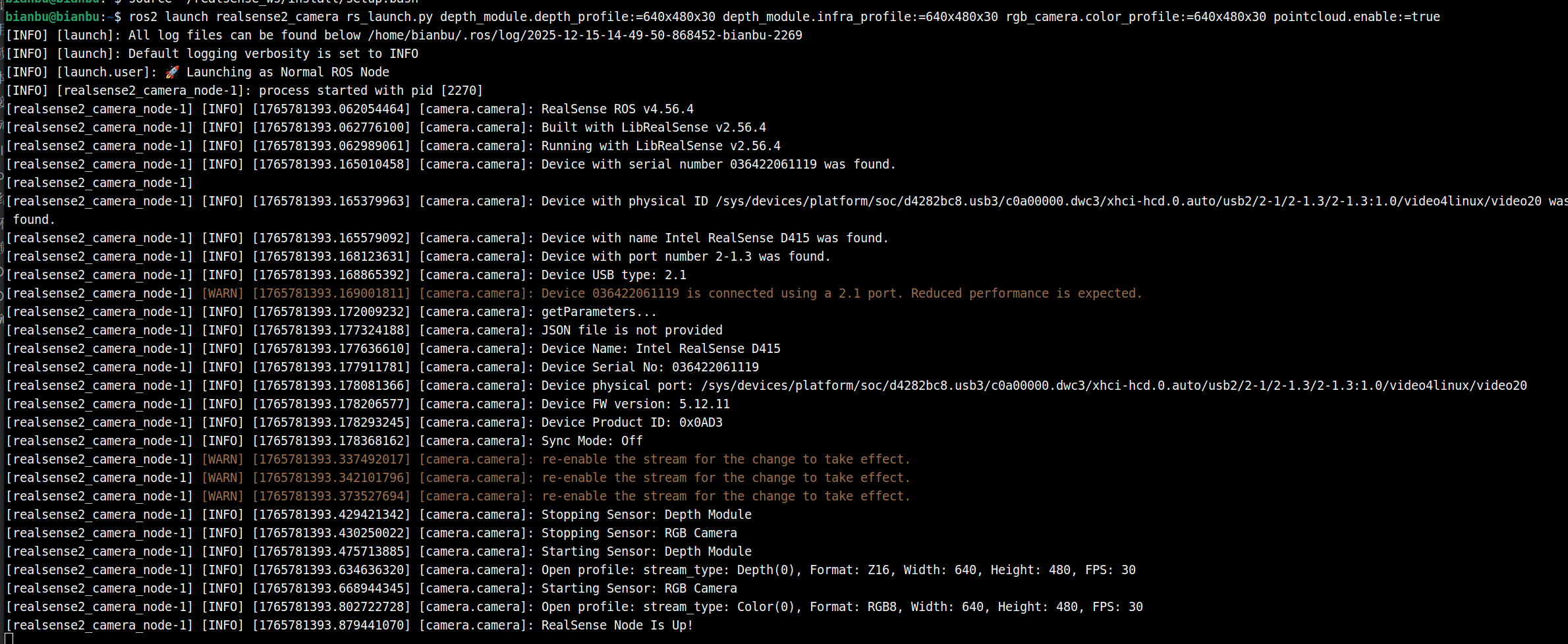
source ~/realsense_ws/install/setup.bash
ros2 launch realsense2_camera rs_launch.py depth_module.depth_profile:=640x480x30 depth_module.infra_profile:=640x480x30 rgb_camera.color_profile:=640x480x30 pointcloud.enable:=true
终端打印如下:
运行 ros2 topic list
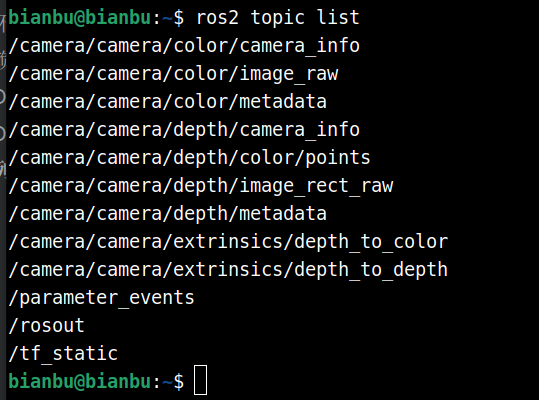
可以看到消息在正常发布
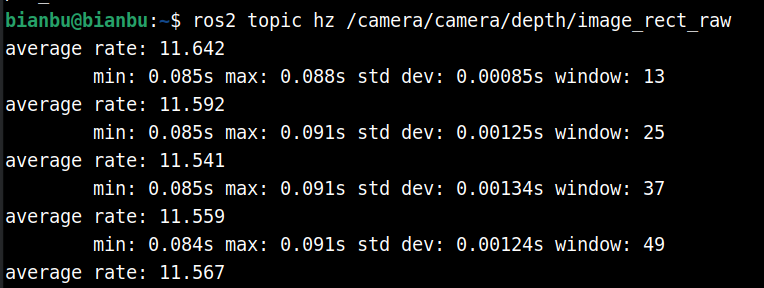
查看深度图的发布频率
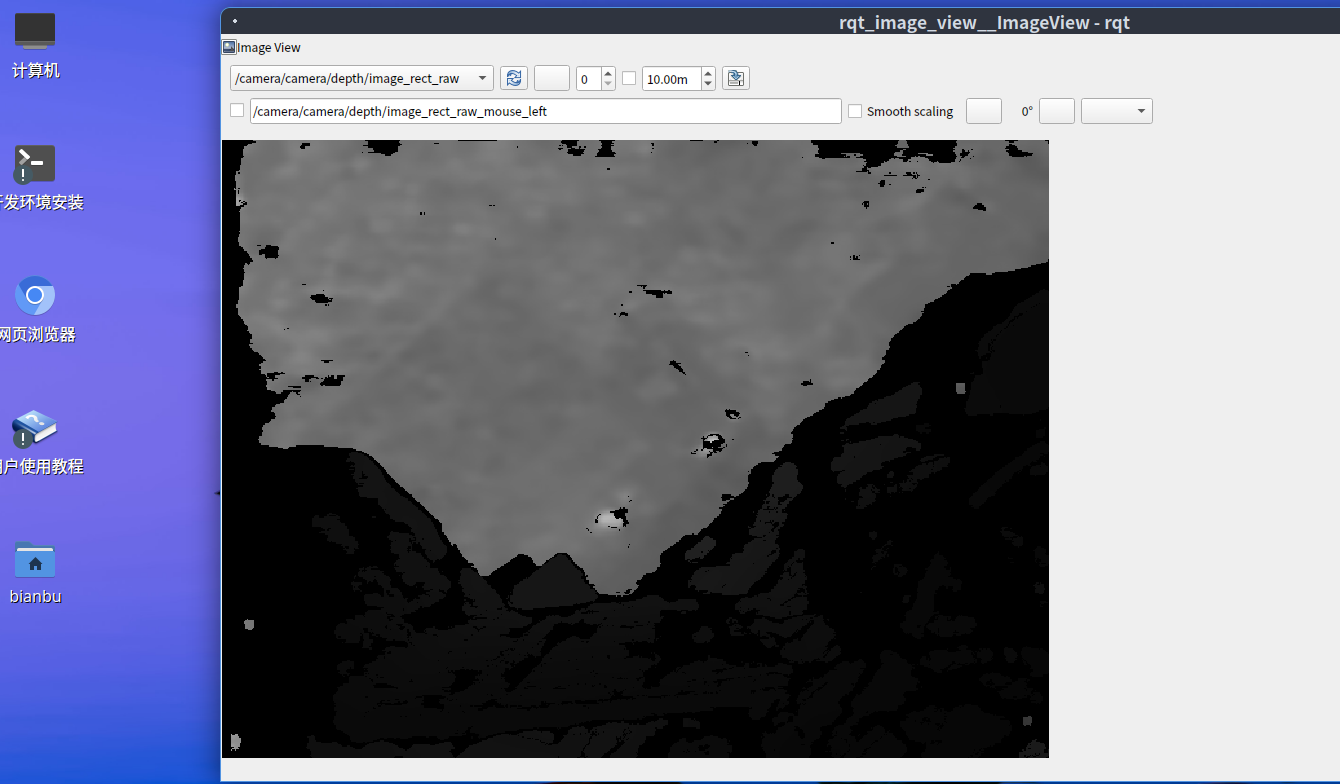
查看深度图
ros2 run rqt_image_view rqt_image_view
更多信息参考:https://github.com/realsenseai/realsense-ros
从 Python 使用
软硬件环境
- 硬件环境:MUSE PI PRO
- 操作系统:ROS2_LXQT
- Realsense 相机型号:D415
- Python Realsense SDK 版本:2.56.5
- Python 版本:3.12
安装依赖
sudo apt install python3-venv python3-pip
安装包
python3 -m venv rs2
source rs2/bin/activate
pip install pyrealsense2 --index-url https://git.spacemit.com/api/v4/projects/33/packages/pypi/simple
示例程序
import pyrealsense2 as rs
pipeline = rs.pipeline() # Create a pipeline
pipeline.start() # Start streaming
try:
while True:
frames = pipeline.wait_for_frames()
depth_frame = frames.get_depth_frame()
if not depth_frame:
continue
width, height = depth_frame.get_width(), depth_frame.get_height()
dist = depth_frame.get_distance(width // 2, height // 2)
print(f"The camera is facing an object {dist:.3f} meters away", end="\r")
finally:
pipeline.stop() # Stop streaming
保存为 demo.py
运行结果
