USB 相机节点
支持的硬件与协议
- 兼容性:所有遵循 UVC (USB Video Class) 且支持 Linux
v4l2驱动的 USB2.0 / USB3.0 摄像头均可工作(常见的 YUYV、MJPEG、H264 等格式)。 - 带宽与端口选择:高分辨率(≥720p)或高帧率(≥30fps)强烈建议使用 USB3.0 摄像头;使用 USB2.0 连接时容易出现丢帧或带宽竞争。
- 电源要求:某些高性能摄像头或自带灯光的模块对 USB 供电敏感,建议主机电源能力充足(例如 5V/3A 以上,视主板与外设总和而定),或使用有源 USB 集线器。
- 驱动与模块:常见内核模块
uvcvideo,必要时检查内核版本、固件与内核日志(dmesg)以确认驱动加载和带宽协商无误。
软硬件环境
请使用 ROS2_LXQT 的系统,硬件建议使用 SpacemiT 的 MUSE Pi Pro
常用测试工具(开发/调试阶段):
lsusb,dmesg | grep uvc,v4l2-ctl --list-devices,v4l2-ctl --list-formats-ext -d /dev/videoX- ROS2:
ros2 topic hz,rqt_image_view
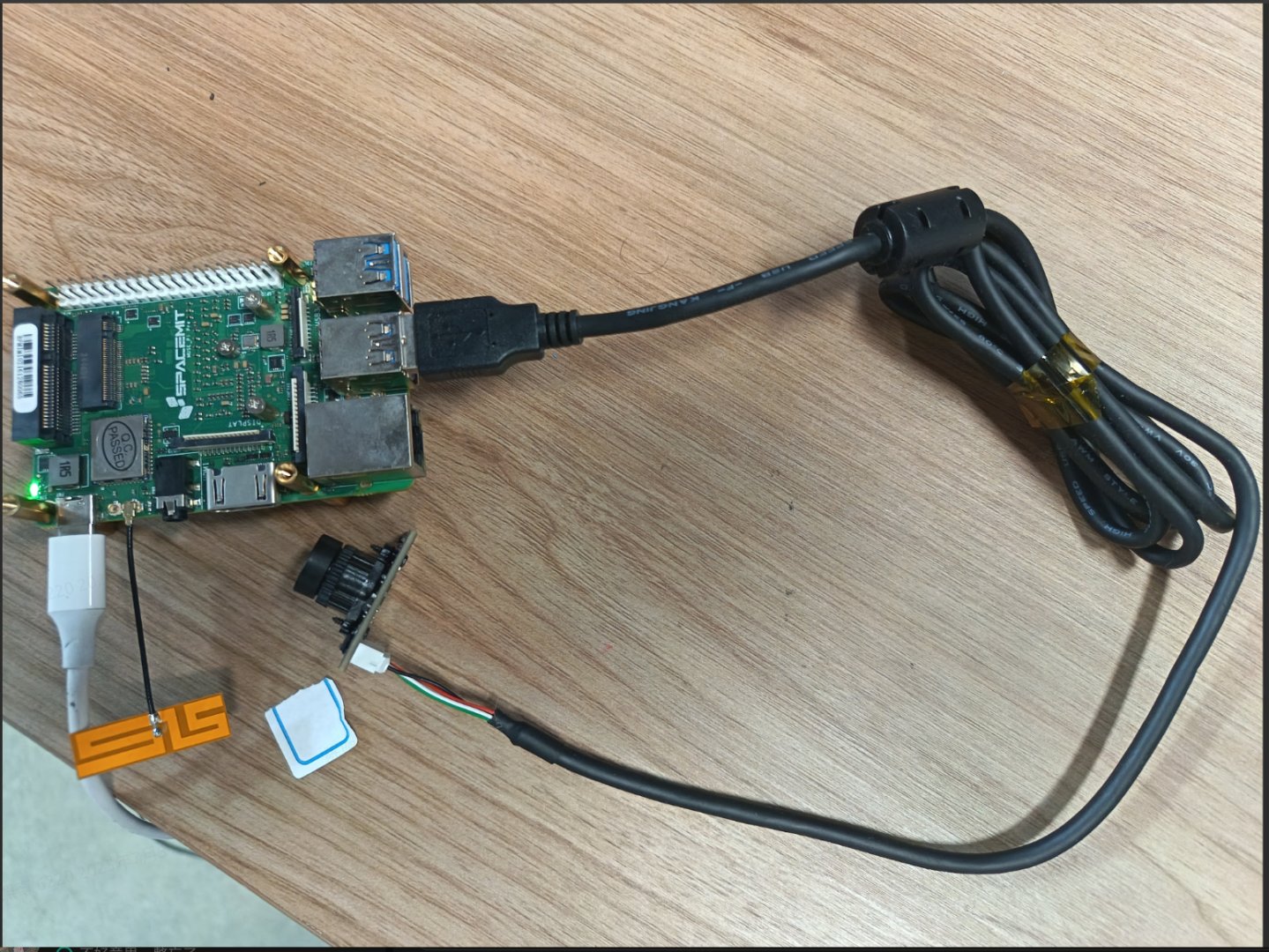
传感器连接示意
查找设备号
-
输入:
ls /dev/video*,输出如下:
-
拔掉相机,再次输入
ls /dev/video*
可以确认设备号为
/dev/video20和/dev/video21,对于一般 USB 相机,使用数值较小的设备号即可,本示例中为/dev/video20
或者使用 v4l2 的工具查看
-
终端输入:
v4l2-ctl --list-devices出现如下输出:

-
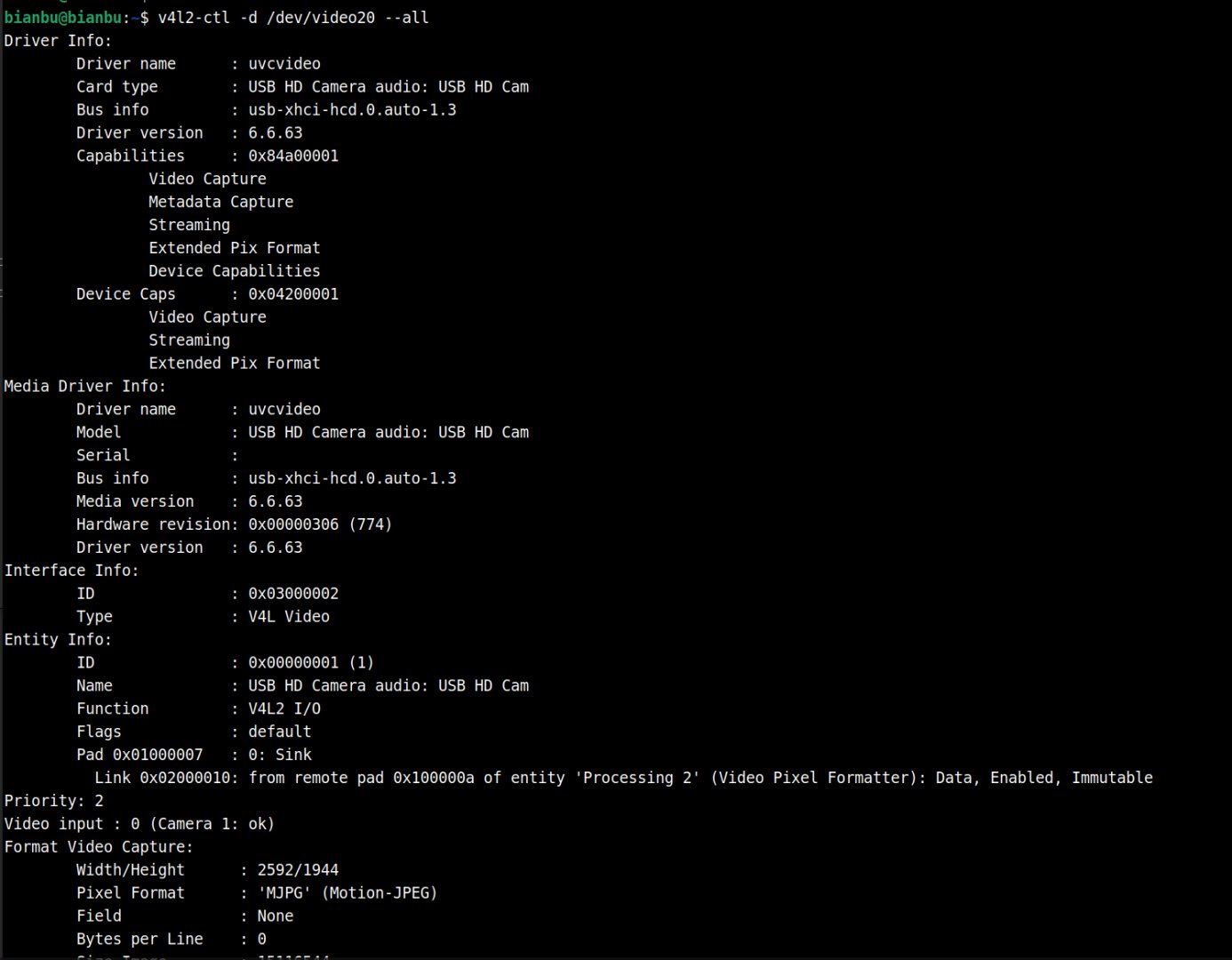
使用
v4l2-ctl -d /dev/video20 --all查看/dev/video20的详细信息输出带有 Format Video Capture 字段一般是用于视频帧捕获的节点
-
使用
v4l2-ctl -d /dev/video21 --all查看/dev/video21的详细信息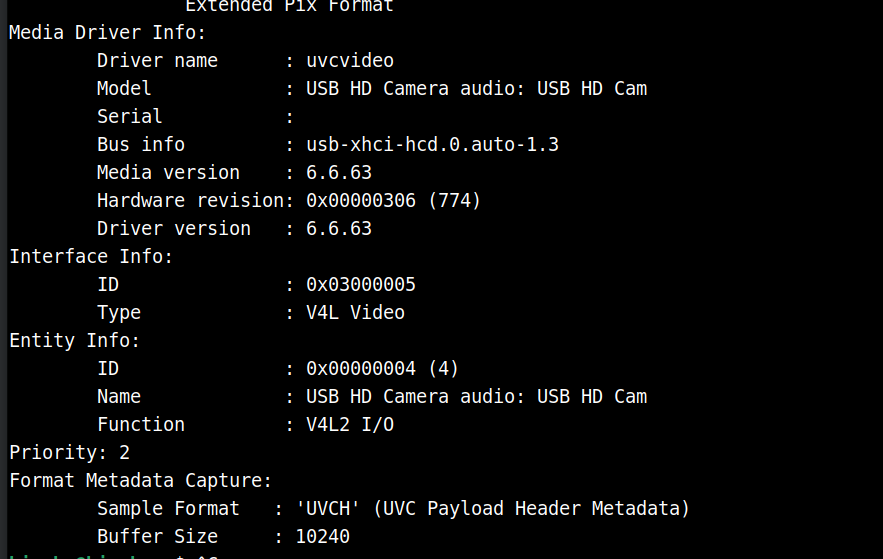
出现:UVC Payload Header Metadata 捕获接口 —— 即 视频元数据捕获接口,它不用于视频图像帧本身
启动文件
rdk_sensors/usb_cam.launch.py
软件依赖
sudo apt install ros-humble-cv-bridge ros-humble-camera-info-manager ros-humble-image-transport \
ros-humble-image-transport-plugins python3-pydantic ffmpeg libopencv-dev
启动命令
ros2 launch rdk_sensors usb_cam.launch.py video_device:="/dev/video20"
这将发布图像原始数据到 /image_raw 话题
参数详解
| 参数名 | 类型 | 默认值 | 候选值/范围 | 说明 |
|---|---|---|---|---|
| camera_name | string | default_cam | 任意字符串 | 相机名称 |
| camera_info_url | string | "" | 有效的 URL | 相机内参文件路径(URL 格式) |
| framerate | double | 30.0 | 相机支持的其它帧率 | 相机采集帧率 |
| frame_id | string | default_cam | 任意字符串 | 相机坐标系 ID |
| image_height | int | 480 | 正整数 | 图像高度(像素) |
| image_width | int | 640 | 正整数 | 图像宽度(像素) |
| io_method | string | mmap | mmap, read, userptr | 视频采集的 I/O 方式 |
| pixel_format | string | yuyv | mjpeg, yuyv, mjpeg2rgb | 像素格式 |
| av_device_format | string | YUV422P | YUV422P, 其他 FFmpeg 支持格式 | 底层 AV 设备格式 |
| video_device | string | /dev/video0 | /dev/videoX | 视频设备路径 |
| brightness | int | 50 | 0 ~ 255 或设备支持范围 | 亮度 |
| contrast | int | -1 | -1 或 0 ~ 255 | 对比度(-1 表示默认) |
| saturation | int | -1 | -1 或 0 ~ 255 | 饱和度(-1 表示默认) |
| sharpness | int | -1 | -1 或 0 ~ 255 | 锐度(-1 表示默认) |
| gain | int | -1 | -1 或设备支持范围 | 增益(-1 表示自动/默认) |
| auto_white_balance | bool | true | true, false | 是否启用自动白平衡 |
| white_balance | int | 4000 | 2000 ~ 7000 | 白平衡色温(K) |
| autoexposure | bool | true | true, false | 是否启用自动曝光 |
| exposure | int | 30 | 40 ~ 1000 | 曝光时间 |
| autofocus | bool | false | true, false | 是否启用自动对焦 |
| focus | int | -1 | -1 或设备支持范围 | 对焦参数(-1 表示自动/默认) |
订阅的消息
无,直接从 USB 相机获取数据
发布的消息
-
pixel_format = yuyv
话题名:/image_raw
ros2 interface show sensor_msgs/msg/Image
-
pixel_format = mjpeg
话题名:/image_raw/compressed
ros2 interface show sensor_msgs/msg/CompressedImage
注意事项
- 丢帧问题:多因 USB 带宽耗尽、CPU 解码不足、内存不足、或使用了被动集线器引起。排查顺序:
dmesg、v4l2-ctl流状态、top/htop、更换到不同的物理 USB 根端口、尝试降低分辨率或改用 MJPG。 - 自动参数抖动:当
auto_exposure/auto_gain开启时,图像亮度在帧间可能剧烈变化,影响检测与跟踪。生产环境建议关闭并锁定一组参数。 - 设备节点不稳定:插拔或顺序变化会导致
/dev/videoX号变化。使用udev基于序列号或 USB 路径创建持久命名(示例 udev 规则见下)。 - 权限问题:容器或系统服务运行用户无
video组权限会无法打开设备。检查并配置udev、用户组与 systemd 服务 User/Group 设置。 - 热量与物理固定:长时间高负载摄像头可能过热并触发 AOI / FPS 降级。为摄像头和主板提供良好散热与稳定机械固定以减少震动影响标定。
- 带宽规划:多相机系统设计时提前做带宽预算(每台相机的压缩率、分辨率、帧率),并根据主板的 USB 控制器拓扑合理分配端口。
- 固件与合规更新:仅使用厂商官方固件进行升级;测试升级对驱动兼容性的影响后再在生产设备上部署。
udev 持久命名(示例)
使用设备的
serial、idVendor和idProduct建立稳定 symlink,例如/dev/video-muse-0。
# /etc/udev/rules.d/80-muse-camera.rules
SUBSYSTEM=="video4linux", ATTRS{idVendor}=="AAAA", ATTRS{idProduct}=="BBBB", \
ATTRS{serial}=="MUSE123456", SYMLINK+="video-muse-0", MODE="0666", GROUP="video"
(用 lsusb -v 或 udevadm info -a -p /sys/class/video4linux/video0 得到具体属性值并替换 AAAA/BBBB/MUSE123456。)
常见故障排查
- 无法识别设备:
lsusb、dmesg - 列表中看不到期望格式:
v4l2-ctl -d /dev/videoX --list-formats-ext - ROS 无图像:
ros2 topic list→ 查看/image_raw是否存在;ros2 topic echo /image_raw或ros2 topic hz /image_raw;用rqt_image_view可视化。 - 丢帧或冻结:检查
dmesg(USB 带宽、错误)、CPU/IO 瓶颈、是否用了被动集线器、尝试降低分辨率/帧率。 - 校准不准确:重复标定并保证棋盘格相对相机的不同角度和距离覆盖良好,记录并固定相机的物理安装位置。