基于RTAB‐Map的VSLAM
最新版本:2025/10/23
简介
RTAB‐Map (Real‐time appearance‐based mapping) 是一种基于外观的闭环检测方法,具有良好的内存管理,以满足处理大场景和在线长周期管理要求。RTAB‐Map集成了视觉和��激光雷达SLAM方案,提供了构建三维地图、在未知环境中进行实时定位与导航的一套完整的解决方案。
本章节演示在k1上运行RTAB‐Map、并在同网段的PC运行gazebo仿真环境的VSLAM示例。
准备工作
- SpacemiT 板子烧录 ROS2_LXQT 系统镜像 。
- PC 端安装 ros-humble 及 RDK。
使用介绍
PC端
安装gazebo仿真环境
在pc打开终端,输入以下命令安装Gazebo。
sudo apt install ros-humble-gazebo*
sudo apt install ros-humble-turtlebot3
sudo apt install ros-humble-turtlebot3-gazebo
sudo apt install ros-humble-turtlebot3-bringup
sudo apt install ros-humble-turtlebot3-simulations
搭建RTAB‐Map环境
打开文件/opt/ros/humble/share/turtlebot3_gazebo/models/turtlebot3_waffle/model.sdf,按照下述步骤修改以添加深度相机:
- 添加以下内容
<joint name="camera_rgb_optical_joint" type="fixed">
<parent>camera_rgb_frame</parent>
<child>camera_rgb_optical_frame</child>
<pose>0 0 0 -1.57079632679 0 -1.57079632679</pose>
<axis>
<xyz>0 0 1</xyz>
</axis>
</joint>
- 修改
<link name="camera_rgb_frame">为<link name="camera_rgb_optical_frame">。 - 添加
<link name="camera_rgb_frame"/>。 - 修改
<sensor name="camera" type="camera">为<sensor name="camera" type="depth">。 - 修改分辨率
1920x1080为640x480。
<width>640</width>
<height>480</height>
K1端
安装RTAB‐Map
在k1打开终端,输入以下命令安装RTAB‐Map与nav2。
sudo apt install ros-humble-rtabmap*
sudo apt install ros-humble-navigation2
sudo apt install ros-humble-nav2-bringup
打开文件/opt/ros/humble/share/rtabmap_demos/launch/turtlebot3/turtlebot3_rgbd.launch.py,注释viz节点。
# Node(
# package='rtabmap_viz', executable='rtabmap_viz', output='screen',
# parameters=[parameters],
# remappings=remappings),
运行VSLAM
- 在pc端打开终端,输入以下命令启动gazebo。
source /opt/ros/humble/setup.bash
source /usr/share/gazebo/setup.sh
export TURTLEBOT3_MODEL=waffle
ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py
- 在k1打开终端,输入以下命令启动RTAB‐Map。
source /opt/ros/humble/setup.bash
ros2 launch rtabmap_demos turtlebot3_rgbd.launch.py
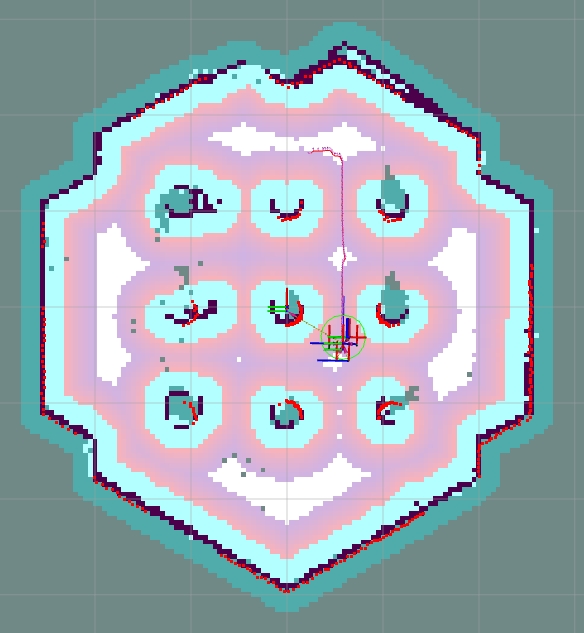
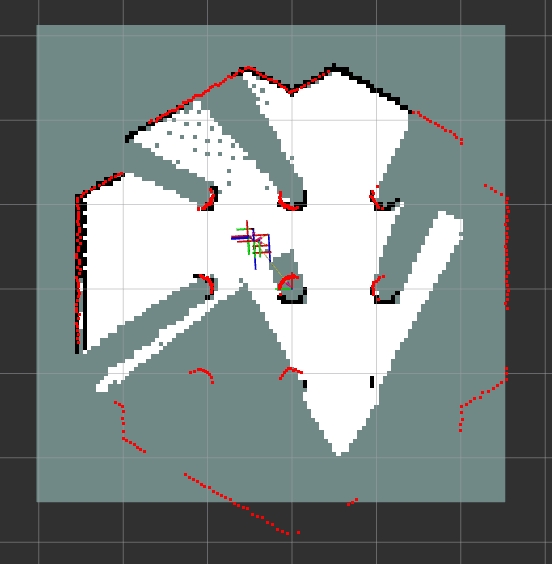
- pc端打开一个新终端,输入命令打开rviz可视化RTAB‐Map运行效果。
source /opt/ros/humble/setup.bash
ros2 launch nav2_bringup rviz_launch.py

- 打开键盘控制节点,控制小车运动进行视觉建图。
source /opt/ros/humble/setup.bash
ros2 run teleop_twist_keyboard teleop_twist_keyboard
运行nav2视觉导航
在完成VSLAM建立完整环境地图之后,按照以下步骤运行基于RTAB‐Map的nav2视觉导航。
- 在pc端打开终端,输入以下命令启动gazebo。
source /opt/ros/humble/setup.bash
source /usr/share/gazebo/setup.sh
export TURTLEBOT3_MODEL=waffle
ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py
- 在k1打开终端,输入以下命令启动纯定位模式的RTAB‐Map。
source /opt/ros/humble/setup.bash
ros2 launch rtabmap_demos turtlebot3_rgbd.launch.py localization:=true
- k1打开一个新终端,输入以下命令启动nav2。
source /opt/ros/humble/setup.bash
ros2 launch nav2_bringup navigation_launch.py params_file:=/opt/ros/humble/share/rtabmap_demos/params/turtlebot3_rgbd_nav2_params.yaml use_sime_time:=true
- pc端打开一个新终端,输入命令打开rviz可视化,点击2D Pose Estimate按钮,按照gazebo环境初始化机器人定位。
source /opt/ros/humble/setup.bash
ros2 launch nav2_bringup rviz_launch.py
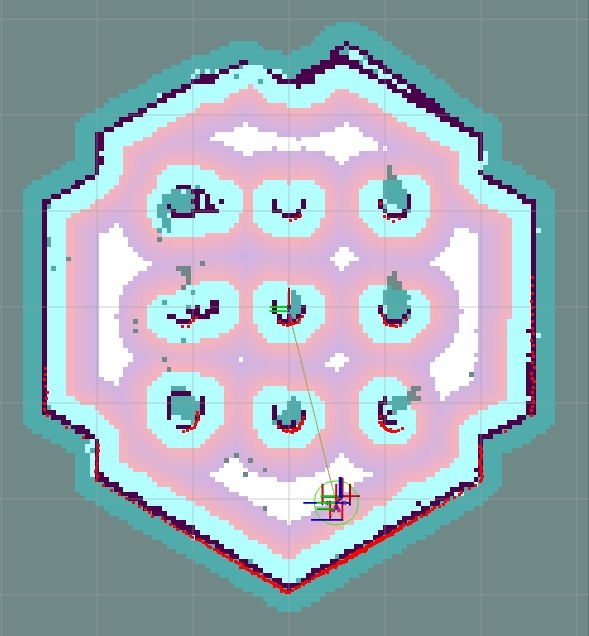
- 点击Nav2 Goal按钮,下发导航目标,进行视觉导航。