5.8.1 Isaac Sim 仿真建图
⚠️运行环境说明:
Isaac Sim运行在 GPU 服务器,Isaac ROS 运行在部署于 GPU 服务器的 Docker 容器(isaac-ros-dev)。
官方教程:Isaac ROS 官方示例
简介
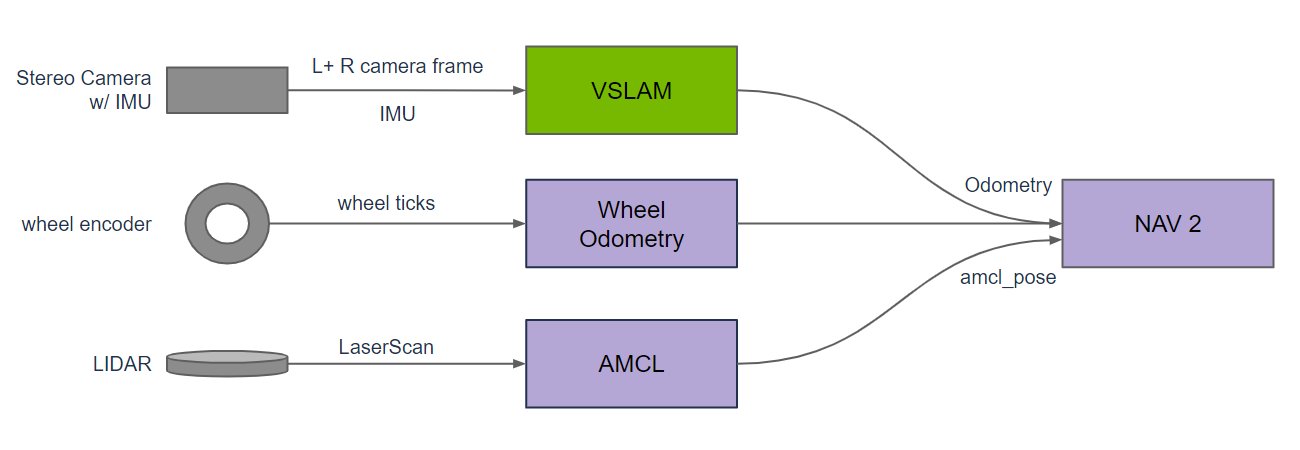
Isaac ROS 的 VSLAM 方案通过融合多传感器数据(Stereo Camera、IMU、编码器、LiDAR)提供导航所需的定位和里程计信息,用于驱动 ROS2 的导航栈(Nav2)。该系统的核心目标是生成精确的 /odom 和 /amcl_pose 消息。
- Stereo Camera + IMU:通过双目视觉 + 惯性测量,实现视觉里程计 + 重定位(定位)
- Wheel Encoder:通过车轮编码器计算的里程信息(增量位置)用于辅助定位
- LiDAR:自适应蒙特卡洛定位(粒子滤波法)使用 LaserScan + 地图进行全局定位
准备工作
下载离线资源
登录AI服务器,下载 issac-ros-vslam 案例配套的资源包:
NGC_ORG="nvidia"
NGC_TEAM="isaac"
PACKAGE_NAME="isaac_ros_visual_slam"
NGC_RESOURCE="isaac_ros_visual_slam_assets"
NGC_FILENAME="quickstart.tar.gz"
MAJOR_VERSION=3
MINOR_VERSION=2
VERSION_REQ_URL="https://catalog.ngc.nvidia.com/api/resources/versions?orgName=$NGC_ORG&teamName=$NGC_TEAM&name=$NGC_RESOURCE&isPublic=true&pageNumber=0&pageSize=100&sortOrder=CREATED_DATE_DESC"
AVAILABLE_VERSIONS=$(curl -s \
-H "Accept: application/json" "$VERSION_REQ_URL")
LATEST_VERSION_ID=$(echo $AVAILABLE_VERSIONS | jq -r "
.recipeVersions[]
| .versionId as \$v
| \$v | select(test(\"^\\\\d+\\\\.\\\\d+\\\\.\\\\d+$\"))
| split(\".\") | {major: .[0]|tonumber, minor: .[1]|tonumber, patch: .[2]|tonumber}
| select(.major == $MAJOR_VERSION and .minor <= $MINOR_VERSION)
| \$v
" | sort -V | tail -n 1
)
if [ -z "$LATEST_VERSION_ID" ]; then
echo "No corresponding version found for Isaac ROS $MAJOR_VERSION.$MINOR_VERSION"
echo "Found versions:"
echo $AVAILABLE_VERSIONS | jq -r '.recipeVersions[].versionId'
else
mkdir -p ${ISAAC_ROS_WS}/isaac_ros_assets && \
FILE_REQ_URL="https://api.ngc.nvidia.com/v2/resources/$NGC_ORG/$NGC_TEAM/$NGC_RESOURCE/\
versions/$LATEST_VERSION_ID/files/$NGC_FILENAME" && \
curl -LO --request GET "${FILE_REQ_URL}" && \
tar -xf ${NGC_FILENAME} -C ${ISAAC_ROS_WS}/isaac_ros_assets && \
rm ${NGC_FILENAME}
fi
这些资源包括 issac ros vslam 案例的离线 bag 和接口配置文件,可用于离线测试 vslam 算法。
安装/编译 issac-ros-visul-slam
进入 issac-ros-dev,安装/编译 issac-ros-visual-slam 包。
- 安装预编译包:
sudo apt-get update
sudo apt-get install -y ros-humble-isaac-ros-visual-slam
- 源码编译:
cd ${ISAAC_ROS_WS}/src
git clone -b release-3.2 https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_visual_slam.git isaac_ros_visual_slam
sudo apt-get update
rosdep update && rosdep install --from-paths ${ISAAC_ROS_WS}/src/isaac_ros_visual_slam/isaac_ros_visual_slam --ignore-src -y
cd ${ISAAC_ROS_WS}/
colcon build --symlink-install --packages-up-to isaac_ros_visual_slam --base-paths ${ISAAC_ROS_WS}/src/isaac_ros_visual_slam/isaac_ros_visual_slam
source install/setup.bash
启动仿真
在 GPU 服务器上启动仿真。
启动 IsaacSim
cd issacsim
./isaac-sim.sh
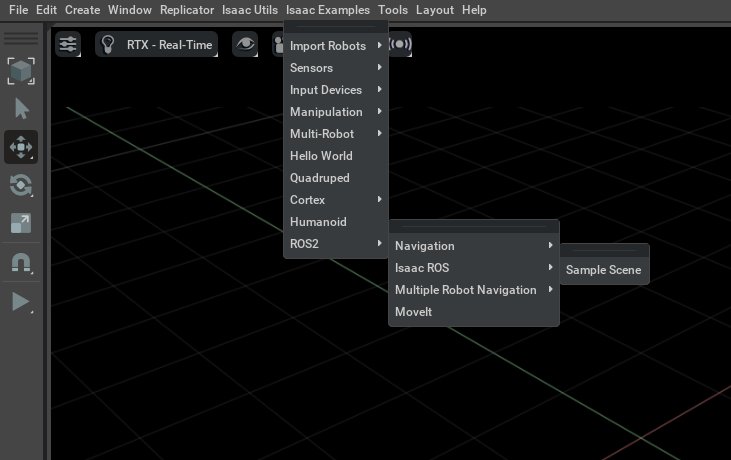
加载场景和小车模型
参考:https://nvidia-isaac-ros.github.io/getting_started/isaac_sim/index.html
启动仿真过程
点击视图左边的 PLAY 按钮,这一步是使场景开始运行,机器人和传感器上电,传感器开始采集数据并发布话题,控制器准备监听订阅的话题(比如速度)。
启动 Issac ROS VSLAM
在 isaac-ros-dev 中启动 issac ros vslam。
启动 VSLAM 系统
ros2 launch isaac_ros_visual_slam isaac_ros_visual_slam_isaac_sim.launch.py
该命令启动 VSLAM 算法节点,自动订阅来自 Isaac Sim 的相机传感器数据和 TF 坐标变换信息,进行视觉里程计算与地图构建,并发布包括 odometry 里程计信息、点云地图等在内的定位与感知信息供后续模块使用。
发布 /cmd_vel 话题
启动一个 ROS2 窗口(可以是 issac-ros-dev/PC/K1,在同一个 ROS2 域即可),发送速度给小车:
ros2 topic pub --once /cmd_vel geometry_msgs/msg/Twist "{linear: {x: 0.2, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 0.2}}"
上述命令发布 /cmd_vel 话题,Isaac Sim 的差分控制器订阅该话题驱动小车运动。具体地,给小车一个 0.2m/s 的线速度和 0.2rad/s 的角速度。使得小车原地绕半径为 1m 的圆逆时针匀速运动。
也可以启动 teleop_twist_keyboard 节点去控制小车运动:
ros2 run teleop_twist_keyboard teleop_twist_keyboard
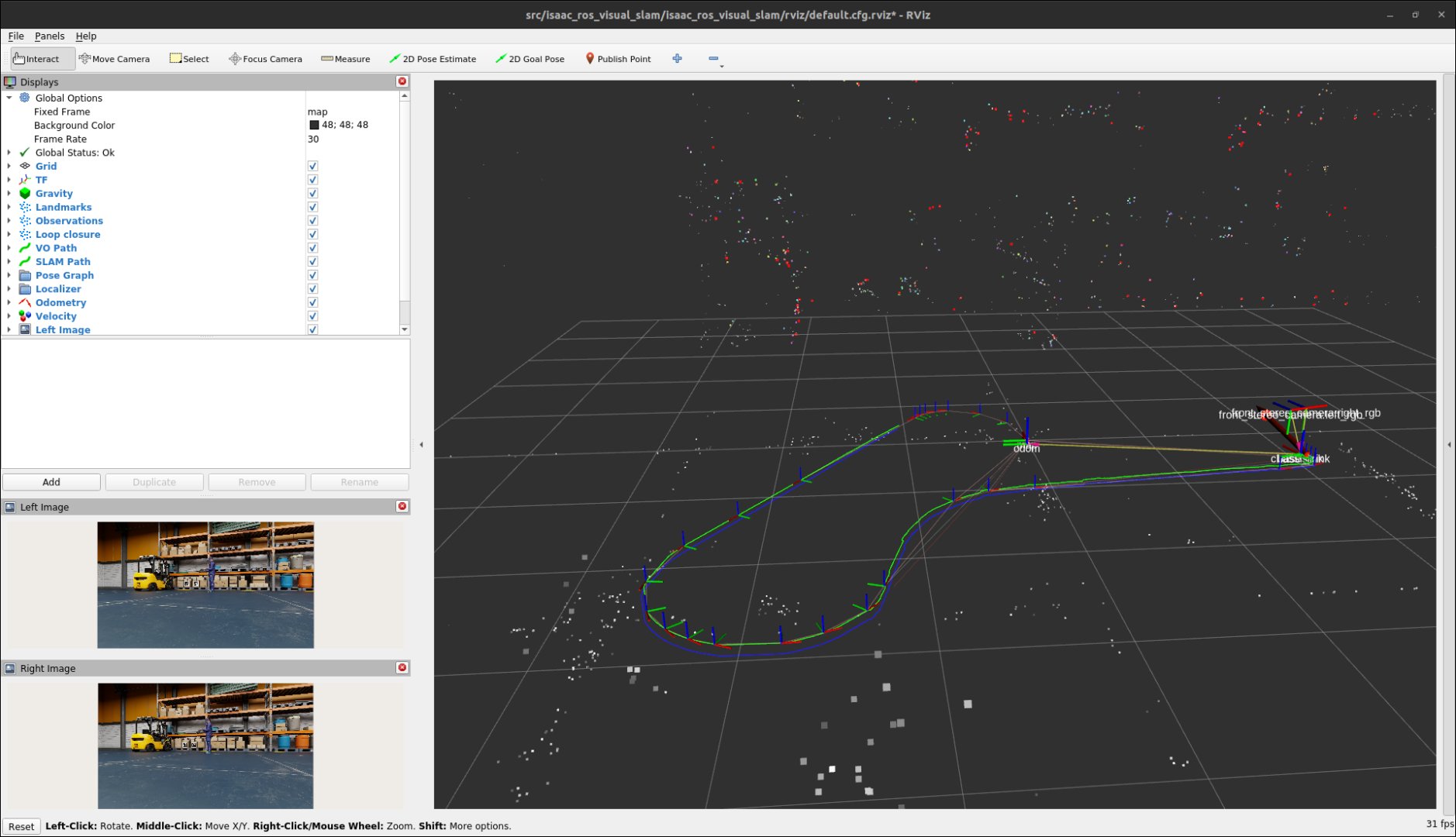
RVIZ 可视化
重启一个 isaac-ros-dev 窗口,在 rviz2 中加载可视化配置文件:
rviz2 -d $(ros2 pkg prefix isaac_ros_visual_slam --share)/rviz/isaac_sim.cfg.rviz
查看里程计信息
启动一个 ROS2 窗口(可以是 issac-ros-dev/PC/K1,同一个 ROS2 域即可),查看小车的里程计信息:
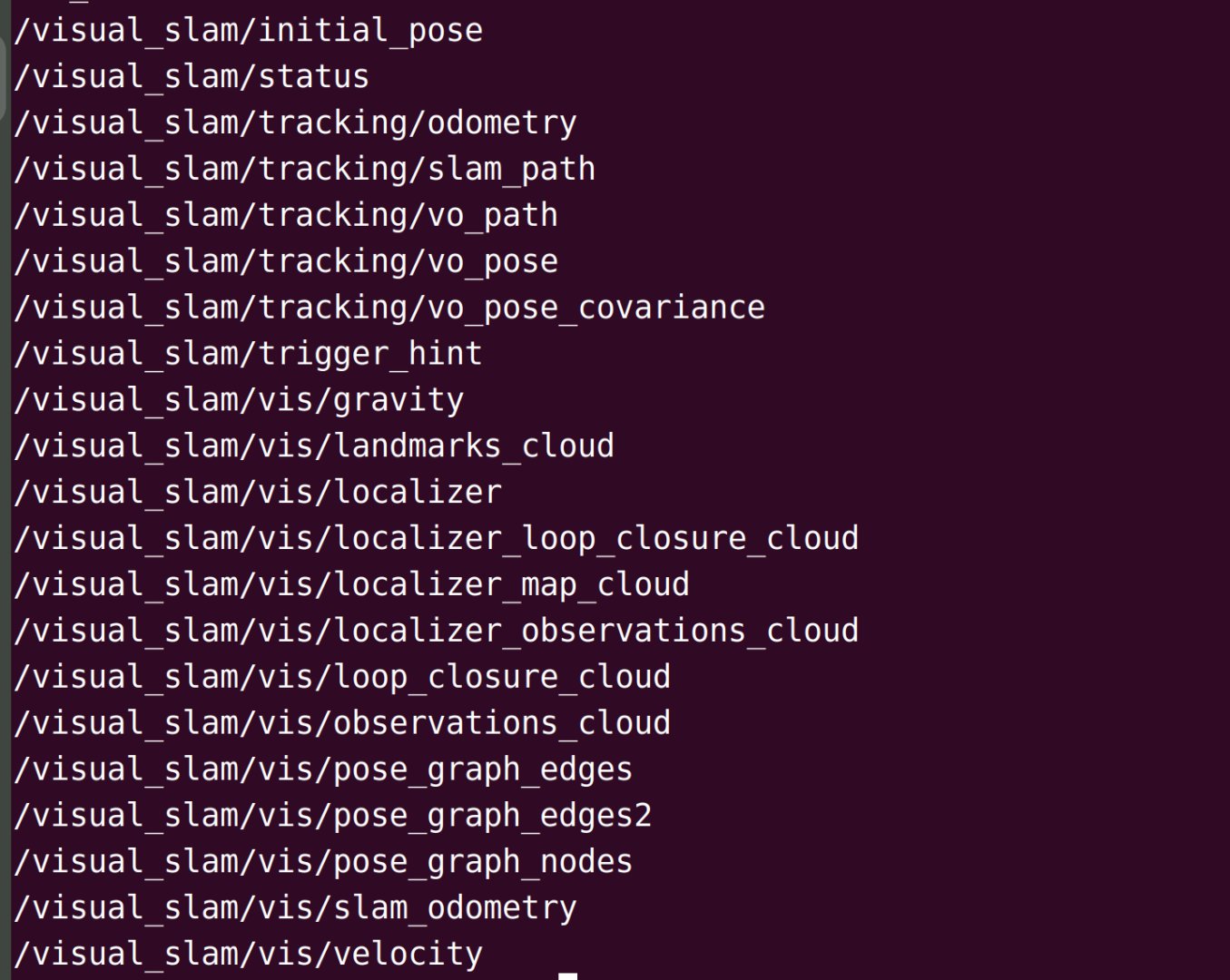
ros2 topic echo /visual_slam/tracking/odometry
保存地图
判断地图是否建好
VSLAM 判断地图是否建好的标准可参考:
- 定位稳定,无跟丢/漂移。可通过查看
/visual_slam/statu话题,没有报告 TRACK_LOST 或 TRACKING_WEAK 状态。 - 地图收敛,点云/关键帧稳定。实时监控
/visual_slam/vis/landmarks_cloud的点云数量,建图后期新增特征点速率应显著下降。
保存地图到本地
Isaac ROS 调用自定义的 save_map 服务来保存地图:
ros2 service call /visual_slam/save_map isaac_ros_visual_slam_interfaces/srv/FilePath "{file_path: /path/to/save/the/map}"
⚠️注意:/path/to/save/the/map 需要为空路径,因为它会覆盖该路径内容
生成的地图为 .mdb 格式,是 Isaac ROS 独有的地图数据格式:
admin@ai-site-4090d:/workspaces/isaac_ros-dev$ ros2 service call /visual_slam/save_map isaac_ros_visual_slam_interfaces/srv/FilePath "{file_path: /tmp/map}"
requester: making request: isaac_ros_visual_slam_interfaces.srv.FilePath_Request(file_path='/tmp/map')
response:
isaac_ros_visual_slam_interfaces.srv.FilePath_Response(success=True)
admin@ai-site-4090d:/workspaces/isaac_ros-dev$ ls -al /tmp/map
total 26436
drwxr-xr-x 2 admin admin 4096 May 29 11:22 .
drwxrwxrwt 1 root root 4096 May 29 11:22 ..
-rw-r--r-- 1 admin admin 27062272 May 29 11:22 data.mdb
使用地图
关闭 vslam节点并重启:
ros2 launch isaac_ros_visual_slam isaac_ros_visual_slam_isaac_sim.launch.py
加载地图并本地化(给一个初始位置):
ros2 service call /visual_slam/localize_in_map isaac_ros_visual_slam_interfaces/srv/LocalizeInMap "
map_folder_path: '/path/to/save/the/map'
pose_hint:
position:
x: x-position
y: y-position
z: z-position
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0"
如果失败,则可能是由于该位置与地图其他位置相似,导致 VSLAM 判断失误,需换一个位置本地化。