文字转语音(TTS)
功能简介
TTS(Text-To-Speech,文本转语音)是一种将输入的文字自动转换为可听语音的技术。它通过语言学分析、声学建模和语音合成等步骤,将自然语言文本生成流畅、自然的人声输出。TTS 技术在智能语音助手、服务机器人、人机交互、无障碍阅读等场景中具有广泛应用。
本示例使用 SpacemiT 智算核进行 TTS 模型推理,并将计算结果通过 ROS2 消息发布。
环境准备
- 建议使用 ROS2_LXQT 操作系统
- 请确保所有终端默认已经执行了
source /opt/bros/humble/setup.bash
硬件连接

这里使用的是轮趣科技的 USB 声卡 + 扬声器来验证 TTS 生成的音频,也可以使用其他 USB 扬声器设备。
设备选型注意:
- 设备应可在 Linux ALSA/PipeWire 下即插即用,无需额外驱动。
- 需至少支持 44.1 kHz 与 48 kHz 两种采样率,以兼容常见语音模型与音频库(如 PortAudio、PyAudio、librosa 等)。
安装系统依赖项
sudo apt update
sudo apt install -y libopenblas-dev \
portaudio19-dev libsndfile1-dev libcurl4-openssl-dev libfftw3-dev espeak-ng \
python3-dev \
ffmpeg \
python3-spacemit-ort \
libcjson-dev \
libasound2-dev \
python3-pip \
python3-venv
查看播放设备信息
audioscan
输出示例:
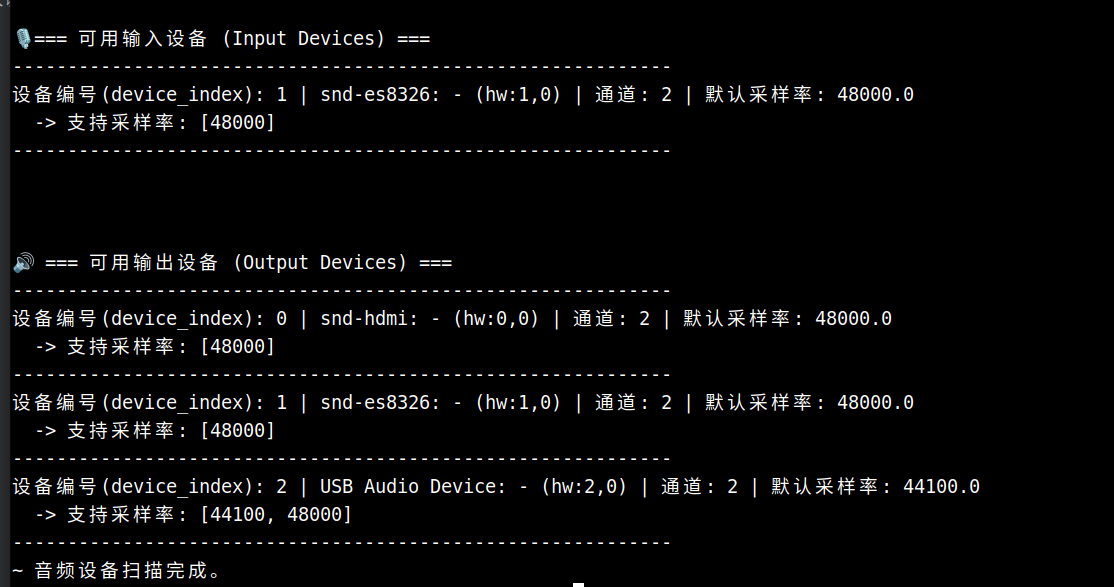
- 输出设备中 USB Audio Device 为 USB 声卡接口,提供标准双通道(立体声)播放能力,支持 44.1kHz 与 48kHz 两种常用采样率。
- 注意:在更换 USB 接口或重新插拔设备后,请重新运行设备扫描以确认编号是否发生变化。
TTS 保存到音频文件
启动 TTS
运行以下命令启动 TTS 示例,输出的音频保存到 .wav 文件
ros2 launch rdk_hri tts_to_file.launch.py text:="你好,今天天气怎么样。" save_audio_path:=output.wav
文件保存到当前目录的 output.wav
终端输出示例:
bianbu@bianbu:~$ ros2 launch rdk_hri tts_to_file.launch.py text:="你好,今天天气怎么样。" save_audio_path:=output.wav
[INFO] [launch]: All log files can be found below /home/bianbu/.ros/log/2025-10-22-14-10-58-405826-bianbu-809614
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [tts_file_node-1]: process started with pid [809615]
[tts_file_node-1] [INFO] [1761113459.092624901] [tts_file_node]: Initializing TTS model...
[tts_file_node-1] All TTS models for zh are ready!
[tts_file_node-1] Found cppjieba dictionary at: /opt/third_party/cppjieba/dict
[tts_file_node-1] Warming up TTS models...
[tts_file_node-1] TTS models warmed up successfully in 1822ms
[tts_file_node-1] TTS model initialized (sample rate: 22050Hz)
[tts_file_node-1] Generating TTS for text: 你好,今天�天气怎么样。
[tts_file_node-1] [INFO] [1761113480.808658349] [tts_file_node]: Generating speech for: "你好,今天天气怎么样。"
[tts_file_node-1] Saving audio to: output.wav
[tts_file_node-1] Successfully saved 59648 samples to output.wav
[tts_file_node-1] [INFO] [1761113482.394660633] [tts_file_node]: Audio saved to output.wav
[INFO] [tts_file_node-1]: process has finished cleanly [pid 809615]
tts_to_file.launch.py 参数说明
| 参数名称 | 说明 | 候选值 | 默认值 |
|---|---|---|---|
text | 传入的需要转为语音的文字 | 自定义 | 你好,这是一个语音合成测试。 |
save_audio_path | 结果音频文件的保存完整路径 | 自定义 | /tmp/tts.wav |
tts_type | 语言种类 | zh、en | zh |
tts_speed | 语速,1.0 为正常速度,>1.0 加快,<1.0 放慢 | > 0.0 | 1.0 |
tts_speaker_id | 说话人 id 标识 | 0、1、2 ... | 0 |
target_rms | 目标 RMS 音量 | 0.05 ~ 0.2 | 0.1 |
compression_ratio | 动态范围压缩,用来平衡音量高低差异 | 1.0 ~ 4.0 | 3.0 |
use_peak_norm | 是否对整个生成音频做 RMS 归一化,保持整体音量稳定 | true、false | false |
TTS 服务节点
TTS 服务节点可以接受文本请求,将文本转为音频消息后发布,可以配合音频播放节点实现实时转录播放的效果。
启动服务节点
ros2 launch rdk_hri tts_service.launch.py
终端打印:
bianbu@bianbu:~$ ros2 launch rdk_hri tts_service.launch.py
[INFO] [launch]: All log files can be found below /home/bianbu/.ros/log/2025-10-22-14-23-33-672288-bianbu-809960
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [tts_service_node-1]: process started with pid [809961]
[tts_service_node-1] All TTS models for zh are ready!
[tts_service_node-1] Found cppjieba dictionary at: /opt/third_party/cppjieba/dict
[tts_service_node-1] Warming up TTS models...
[tts_service_node-1] TTS models warmed up successfully in 1867ms
[tts_service_node-1] TTS model initialized (sample rate: 22050Hz)
[tts_service_node-1] [INFO] [1761114236.444587109] [tts_service_node]: ✅ TTS service node ready. Waiting for text requests...
启动播放节点
ros2 launch rdk_hri player.launch.py \
output_device_index:=2 \
sub_topic:=/tts/audio_frame \
target_sample_rate:=48000
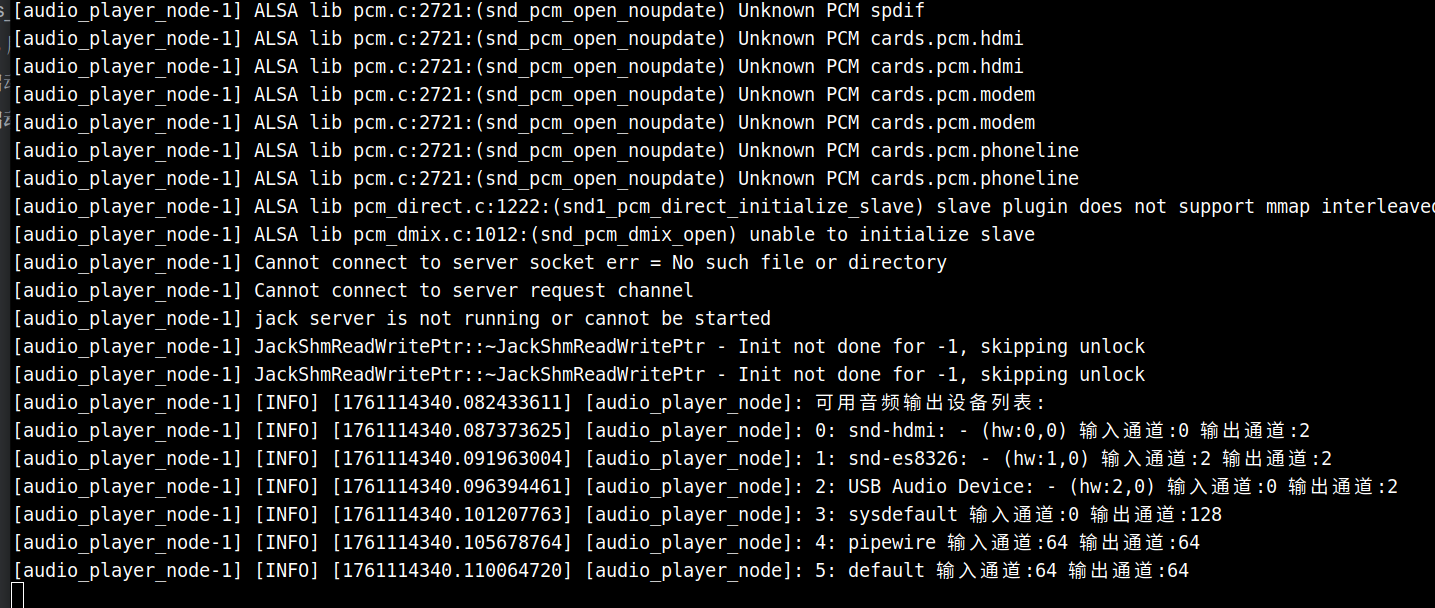
终端打印部分示例:
调用服务
终端快速调用:
ros2 service call /tts_service jobot_interfaces/srv/TTSInfer "{text: '你好'}"
扬声器有语音输出即为正常。
python代码调用:
import rclpy
from rclpy.node import Node
from jobot_interfaces.srv import TTSInfer
class TTSClient(Node):
def __init__(self):
super().__init__('tts_client')
self.cli = self.create_client(TTSInfer, 'tts_service')
while not self.cli.wait_for_service(timeout_sec=1.0):
self.get_logger().info('Service not available, waiting...')
def send_request(self, text):
req = TTSInfer.Request()
req.text = text
future = self.cli.call_async(req)
rclpy.spin_until_future_complete(self, future)
return future.result()
def main(args=None):
rclpy.init(args=args)
client = TTSClient()
response = client.send_request('你好')
print('Response:', response) # 根据 TTSInfer 的定义,这里可能是 audio path 或字节数据
client.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
tts_service.launch.py 参数说明
| 参数名称 | 说明 | 候选值 | 默认值 |
|---|---|---|---|
pub_topic | 发布的音频流话题 | 自定义 | /tts/audio_frame |
tts_type | 语言种类 | zh、en | zh |
tts_speed | 语速,1.0 为正常速度,>1.0 加快,<1.0 放慢 | > 0.0 | 1.0 |
tts_speaker_id | 说话人 id 标识 | 0、1、2 ... | 0 |
target_rms | 目标 RMS 音量 | 0.05 ~ 0.2 | 0.1 |
compression_ratio | 动态范围压缩,用来平衡音量高低差异 | 1.0 ~ 4.0 | 3.0 |
use_peak_norm | 是否对整个生成音频做 RMS 归一化,保持整体音量稳定 | true、false | false |