LeRobot 使用指南
本文档介绍 K1 上的 LeRobot 使用指南,提供 K1 设备上运行端到端(e2e) 机械臂应用的完整流程,涵��盖以下内容:
- SO-101 机械臂(包括主导臂和随从臂)的标定、遥控操作及数据采集流程;
- ACT 模型训练(X86开发机)并部署于 K1 本地推理,实现机械臂的木块抓取任务;
- SmolVLA 模型微调(X86开发机)并进行分布式部署,完成机械臂的木块抓取任务。
物料准备
运行本项目所需的软硬件设备如下:
- 训练平台:一台配置 RTX 系列及以上 GPU 的 X86 开发机
- 本地环境:K1 开发板 + Bianbu ROS 固件
- 机械臂:SO-101 主从机械臂
- 视觉输入:两个 USB 相机
软件环境安装
[!NOTE]
本文档需要保持两份环境,一份是开发机环境,主要用于数采(可视化需要)和模型训练;另一份是 K1 本地环境,主要用于模型部署和推理。在开发机和 K1 开发板上均须安装软件环境。其他如无特殊说明,均在 K1 操作。
下载源码
wget https://archive.spacemit.com/ros2/prebuilt/brdk_integration/python/lerobot/lerobot.tar.gz
tar -xvf lerobot.tar.zg -C ~
[!CAUTION]
为降低多个视角视频帧的总吞吐,Bianbu ROS 在 LeRobot 官方源码基础上,对视频帧进行了 MJPG 格式化处理。除此之外,未做其他修改,以确保最大程度地兼容上游代码。
安装系统依赖
首先,更新系统并安装所需的依赖:
sudo apt update
sudo apt install python3-venv ffmpeg
- python3-venv:使用 pip 虚拟环境来管理 LeRobot 项目依赖
- ffmpeg:视频帧处理需要
安装 python 依赖
下载并激活预安装的虚拟环境压缩包:
wget https://archive.spacemit.com/ros2/prebuilt/brdk_integration/python/lerobot/lerobot-venv.tar.gz
tar -xvf lerobot-venv.tar.gz -C ~
source ~/.lerobot-venv/bin/activate
也可以直接从 LeRobot 源码安装:
python3 -m venv ~/.lerobot-venv
source ~/.lerobot-venv/bin/activate
cd ~/lerobot
pip install -e . && pip install "lerobot[all]"
前置准备
机械臂标定
lerobot-find-port
- USB 设备在 K1 板卡中常以
/dev/ttyACM0形式出现,运行以下代码获取权限:
sudo chmod 666 /dev/ttyACM0
- 确认串口后,分别对所有机械臂进行标定:
# 从臂
lerobot-calibrate \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \
--robot.id=my_awesome_follower_arm # 自定义
# 主臂
lerobot-calibrate \
--teleop.type=so101_leader \
--teleop.port=/dev/ttyACM1 \
--teleop.id=my_awesome_leader_arm # 自定义
记得更换设备号与自己系统一致。具体过程参考 Hugging Face 官方标定教程。
遥控操作
- 机械臂设备确认
开始遥操作或数据采集之前运行以下命令以确认机械臂串口号:
lerobot-find-port
- 无相机遥操
确定串口号正确配置后,运行以下命令进行无相机遥操作:
lerobot-teleoperate \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \
--robot.id=my_awesome_follower_arm \
--teleop.type=so101_leader \
--teleop.port=/dev/ttyACM1 \
--teleop.id=my_awesome_leader_arm
- 相机确认
笔者使用了两个 USB 摄像头,其中一个固定在操作台面顶部(top),提供全局视角;另一个则固定在侧面(side),以获取更加细致的操作视角。摄像头的摆放原则是确保摄像头能够捕捉到任务执行过程中的关键细节,同时避免画面中出现其他无关物体,从而确保数据集的高质量和精度。在固定好摄像头视角后,将两个 USB 摄像头连接至 K1 开发板,并运行以下命令查看摄像头 ID:
lerobot-find-cameras opencv
终端将打印出以下信息:
--- Detected Cameras ---
Camera #0:
Name: OpenCV Camera @ /dev/video2
Type: OpenCV
Id: /dev/video20
Backend api: V4L2
Default stream profile:
Format: 0.0
Width: 640
Height: 480
Fps: 30.0
--------------------
Camera #1:
Name: OpenCV Camera @ /dev/video4
Type: OpenCV
Id: /dev/video22
Backend api: V4L2
Default stream profile:
Format: 0.0
Width: 640
Height: 480
Fps: 30.0
--------------------
Finalizing image saving...
Image capture finished. Images saved to outputs/captured_images
在 outputs/capture_images 目录中找到每个摄像头拍摄的图片,并确认不同位置摄像头对应的端口 ID。
- 可视化遥操
确定相机 ID 后,运行以下命令进行可视化遥操作,来确认视觉输入的质量是否符合要求:
lerobot-teleoperate \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \
--robot.id=my_awesome_follower_arm \
--robot.cameras="{
top: {type: opencv, index_or_path: 2, width: 640, height: 480, fps: 30},
side: {type: opencv, index_or_path: 4, width: 640, height: 480, fps: 30}
}" \
--teleop.type=so101_leader \
--teleop.port=/dev/ttyACM1 \
--teleop.id=my_awesome_leader_arm \
--display_data=true
数据集采集
- 在进行数据采集之前可以选择是否登录
huggingface-cli,登录后方便数据集模型上传至云端
hf auth login
根据提示输入自己的 huggingface token。
- 登陆后即可指定
<HF_USER>:
HF_USER=$(hf auth whoami | head -n 1 | awk '{print $3}')
echo $HF_USER
若不指定,需要对以下内容的 <HF_USER> 进行替换为随意名称。
- 接下来开始进行数据采集
接下运行以下代码开始数据采集:
lerobot-record \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \
--robot.id=my_awesome_follower_arm \
--robot.cameras="{
top: {type: opencv, index_or_path: 2, width: 640, height: 480, fps: 30},
side: {type: opencv, index_or_path: 4, width: 640, height: 480, fps: 30}
}" \
--teleop.type=so101_leader \
--teleop.port=/dev/ttyACM1 \
--teleop.id=my_awesome_leader_arm \
--dataset.num_episodes=60 \
--dataset.episode_time_s=30 \
--dataset.reset_time_s=30 \
--dataset.repo_id=${HF_USER}/record-green-cube \
--dataset.single_task="Place the green cube into the box" \
--dataset.root=./datasets/record-green-cube \
--dataset.push_to_hub=True \
--play_sounds=false \
--display_data=true # 开启此参数需要在X86端
-
参数说明
dataset.num_episodes: 表示预期收集多少组数据dataset.episode_time_s: 表示每次收集数据的时间dataset.reset_time_s:是每次数据收集之间的准备时间dataset.repo_id:$HF_USER为当前用户,record-green-cube为数据集名称dataset.single_task:任务指令,可用于 VLA 模型输入dataset.root:设置数据集存储的位置,默认在~/.cache/huggingface/lerobot/dataset.push_to_hub: 决定是否将数据上传到 HuggingFace Hub- play_sounds:是否播放指令声音
- display_data:是否显示图形化界面,如果开启此参数,建议在 X86 服务器上进行数采
具体命令可以使用 --help 来获取。
-
检查点和恢复
- 在录制期间会自动创建检查点。
- 如果出现问题,可以通过使用
--resume=true重新运行相同的命令来恢复。 - 要从头开始录制, 请手动删除数据集目录。
-
录制期间的键盘控制(X11模式下生效)
- 按 向右箭头 (
→): 提前停止当前剧集或重置时间并移至下一集。 - 按 向左箭头 (
←): 取消当前剧集并重新录制。 - 按 Esc (
ESC): 立即停止会话,对视频进行编码,然后�上传数据集。
- 按 向右箭头 (
-
Tips of record
- 一个好的开始任务是抓住不同位置的物体并将其放入垃圾箱中。
- 建议至少录制 50 集,每个位置 10 集。
- 在整个录制过程中保持摄像机固定并保持一致的抓取行为。
- 能够通过仅查看相机图像来自己完成任务。
ACT 模型训练及部署
ACT(Action Chunking Transformer) 是 ALOHA 团队在 2023 年 4 月提出的一种 模仿学习算法,旨在解决精细操作任务中的挑战。ACT 结合了 Transformer 模型的强大表达能力和 动作分块(Action Chunking) 技术,能够在机器人控制等任务中学习更加复杂的动作序列,并且能在长时间任务中高效执行。
模型训练(X86开发机)
移动数据集到开发机上
如果在 K1 本地采集的数据集,需要将数据集上传到开发机:
- 若开发机正确配置代理,且已将数据集
push至huggingface,可选择在训练时通过repo_id方式加载数据集,需要在开发机终端登录huggingface。 - 若未配置代理,且数据集保存在本地,请将数据集移动至开发机
~/lerobot/datasets数据集。
wandb 设置
启动 wandb(可选),运行以下命令wandb方便观察训练曲线:
wandb login
模型训练
运行以下代码开始训练,可通过 src\lerobot\configs\train.py 文件修改训练参数
lerobot-train \
--dataset.repo_id={HF_USER}/record-green-cub \
--dataset.root=datasets/record-green-cube \
--policy.type=act \
--output_dir=outputs/train/act_so101_pickplace \
--job_name=act_so101_pickplace \
--policy.device=cuda \
--steps=200000
--wandb.enable=true \
--policy.repo_id=${HF_USER}/my_act_policy
- 参数说明
dataset.repo_id:从 hugging face 下载数据集用于训练dataset.root:使用本地数据集进行训练,优先于dataset.repo_idpolicy.type:使用的策略类型,用于从零训练output_dir:模型检查点和 wandb 数据保��存路径job_name:任务名称policy.device:训练设备,cpu | coda | mps 可选wandb.enable:是否选择启动 wandbpolicy.repo_id:策略 id
[!NOTE]
笔者使用的卡是 RTX 4090,数据集为 60 组操作数据,训练 200k 轮(直到 loss 收敛至最低即可),batch size为8,大约需要4小时。
模型部署
将模型复制到 K1 开发板
在开发机上完成模型训练后,将最终的模型检查点复制到 K1 开发板的 lerobot 目录下。模型路径及结构如下:
(.lerobot-venv) ➜ lerobot git:(main) ✗ tree outputs/train/act_so101_pickplace/checkpoints/last/pretrained_model
outputs/train/act_so101_pickplace/checkpoints/last/pretrained_model
├── config.json
├── model.safetensors
└── train_config.json
1 directory, 3 files
config.json:模型配置文件,包含模型的超参数和其他配置model.safetensors:保存模型权重的文件train_config.json:训练过程中使用的配置文件,记录了训练参数
模型推理
将模型部署到 K1 开发板后,可以在本地执行推理任务。以下是执行抓取任务的命令示例:
lerobot-record \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \
--robot.cameras="{
top: {type: opencv, index_or_path: 2, width: 640, height: 480, fps: 30},
side: {type: opencv, index_or_path: 4, width: 640, height: 480, fps: 30}
}" \
--robot.id=my_awesome_follower_arm \
--display_data=false \
--dataset.repo_id=${HF_USER}/eval_act \
--dataset.single_task="Place the greeb cube into the box" \
--policy.path=outputs/train/act_so101_pickplace/checkpoints/last/pretrained_model \
--policy.device=cpu \
--dataset.episode_time_s=180 \
--dataset.reset_time_s=30 \
--play_sounds=false
SmolVLA 模型微调及推理
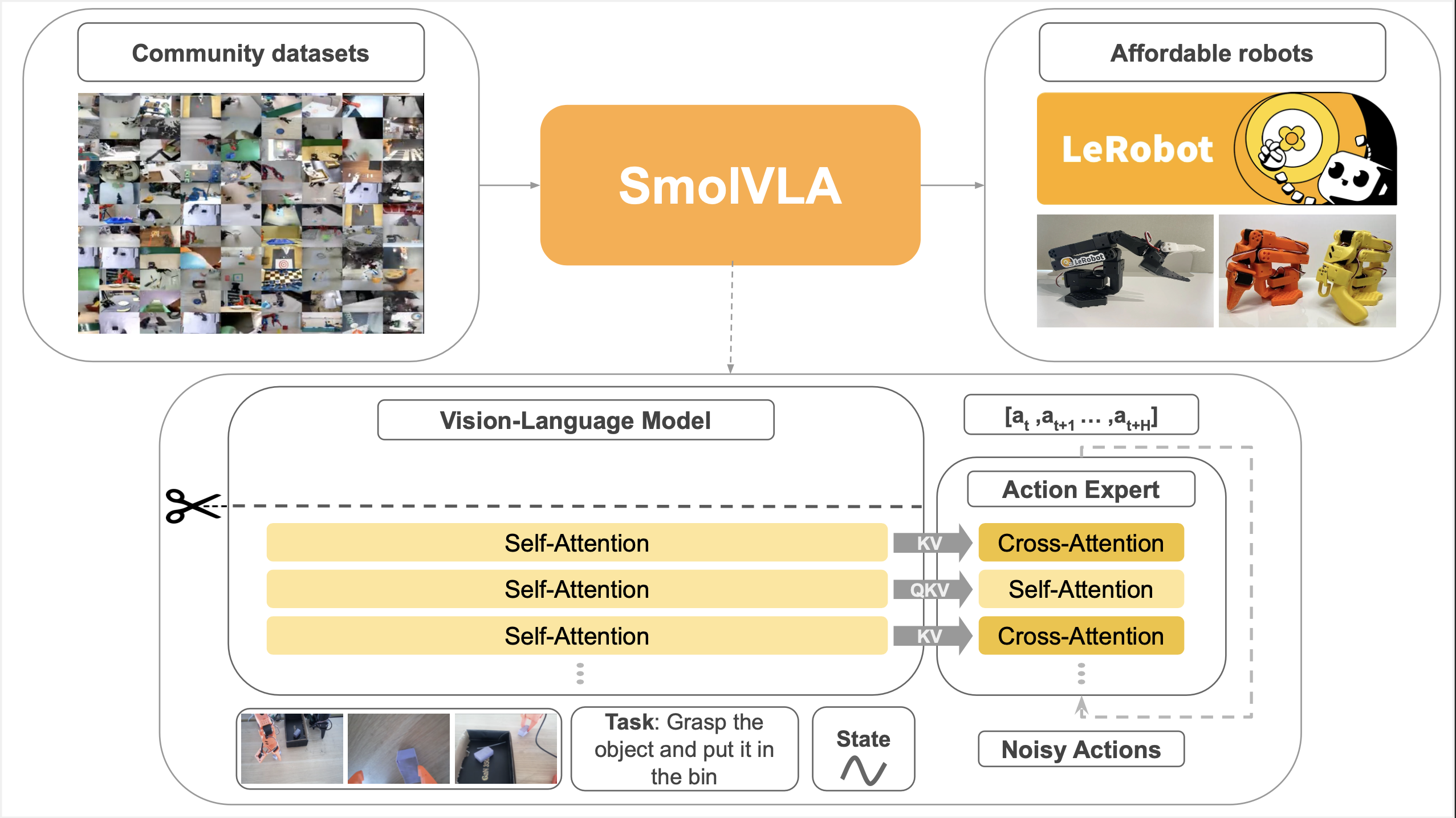
SmolVLA 模型是一个轻量级的视觉-语言-动作(VLA)模型,具有仅 450M 的参数量,能够在消费级 GPU 上高效地进行训练和部署。该模型在视觉-大语言模型(VLM)的基础上,融入了动作专家(Action Expert)模块,能够理解视觉输入(如图像或视频流)以及自然语言指令,并根据这些输入生成机器人动作序列。
模型微调(X86开发机)
建议基于 Hugging Face 官方发布的基础模型进行微调,这样模型可以从已经训练好的通用场景中快速学习到特定场景下的知识和技能。
微调指令:
lerobot-train \
--dataset.repo_id=${HF_USER}/record-green-cub \
--dataset.root=datasets/record-green-cube \
--policy.path=lerobot/smolvla_base \
--policy.repo_id=${HF_USER}/my_smolvla_policy_findtune \
--output_dir=outputs/train/smolvla_so101_pickplace_finetune \
--job_name=smolvla_so101_pickplace \
--policy.device=cuda \
--steps=200000 \
--wandb.enable=true
policy.path:基础模型的路径或者名字,这里指 lerobot 项目的 vla_base 模型
分布式部署
K1 本地的算力无法直接运行 SmolVLA 模型,可以借助 LeRobot 项目提供的分布式方法来部署 SmolVLA。具体地,K1 作为客户端,负责数据采集和动作执行;X86 开发机作为服务端,负责使用 SmolVLA 模型来推理产生动作序列。客户端和服务端通过 gRPC 协议进行数据传输和指令交互。客户端将采集到的视觉数据和传感器信息发送给服务端,服务端使用 SmolVLA 模型对数据进行推理,生成相应的动作序列,再将这些动作序列返回给客户端,驱动机械臂执行抓取任务。
服务端指令:
python src/lerobot/scripts/server/policy_server.py \
--host=0.0.0.0 \
--port=8080 \
--fps=30 \
--inference_latency=0.033 \
--obs_queue_timeout=1
客户端指令:
python src/lerobot/scripts/server/robot_client.py \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \
--robot.cameras="{
top: {type: opencv, index_or_path: 2, width: 640, height: 480, fps: 30},
side: {type: opencv, index_or_path: 4, width: 640, height: 480, fps: 30}
}" \
--robot.id=my_awesome_follower_arm \
--task="Place the greeb cube into the box" \
--server_address=${server_ip}:8080 \
--policy_type=smolvla \
--pretrained_name_or_path=outputs/train/smolvla_so101_pickplace_finetune/checkpoints/last/pretrained_model \
--policy_device=cuda \
--actions_per_chunk=50 \
--chunk_size_threshold=0.5 \
--aggregate_fn_name=weighted_average \
--debug_visualize_queue_size=True
常见问题排查
Rerun 渲染失败
bianbu ros上图形渲染后端为gles,rerun默认选择vulkan作为渲染后段,使用下面字段指定gles后端:
export WGPU_BACKEND=gles