5.4.8 人体姿��态检测
YOLOv8-Pose 模型简介
YOLOv8-Pose 是 Ultralytics YOLOv8 系列中的 姿态估计(Pose Estimation) 模型,专用于检测人体关键点(如头部、肩膀、膝盖等)的位置。它基于 YOLOv8 的目标检测架构扩展,实现了快速且精确的 2D 姿态估计功能,适用于智能安防、体育分析、人机交互、机器人等应用场景。
本示例展示如何基于 SpaceMiT 智算核,使用图片或视频流作为输入,执行 YOLOv8-Pose 姿态估计模型的推理,并通过 ROS 2 发布检测结果(包括边界框坐标和人体关键点)。
环境准备
安装依赖
sudo apt install python3-opencv ros-humble-cv-bridge ros-humble-camera-info-manager \
ros-humble-image-transport python3-spacemit-ort
导入 ROS2 环境
source /opt/bros/humble/setup.bash
模型配置查看
可执行以下命令,查看当前系统中已支持的模型配置:
ros2 launch br_perception infer_info.launch.py | grep 'pose'
示例输出:
[list-1] - config/pose/yolov8_pose.yaml
后续推理时,将 config_path 设置为相应的 .yaml 文件路径,即可使用对应姿态估计模型。
人体关键点定义
人体关键点定义如下
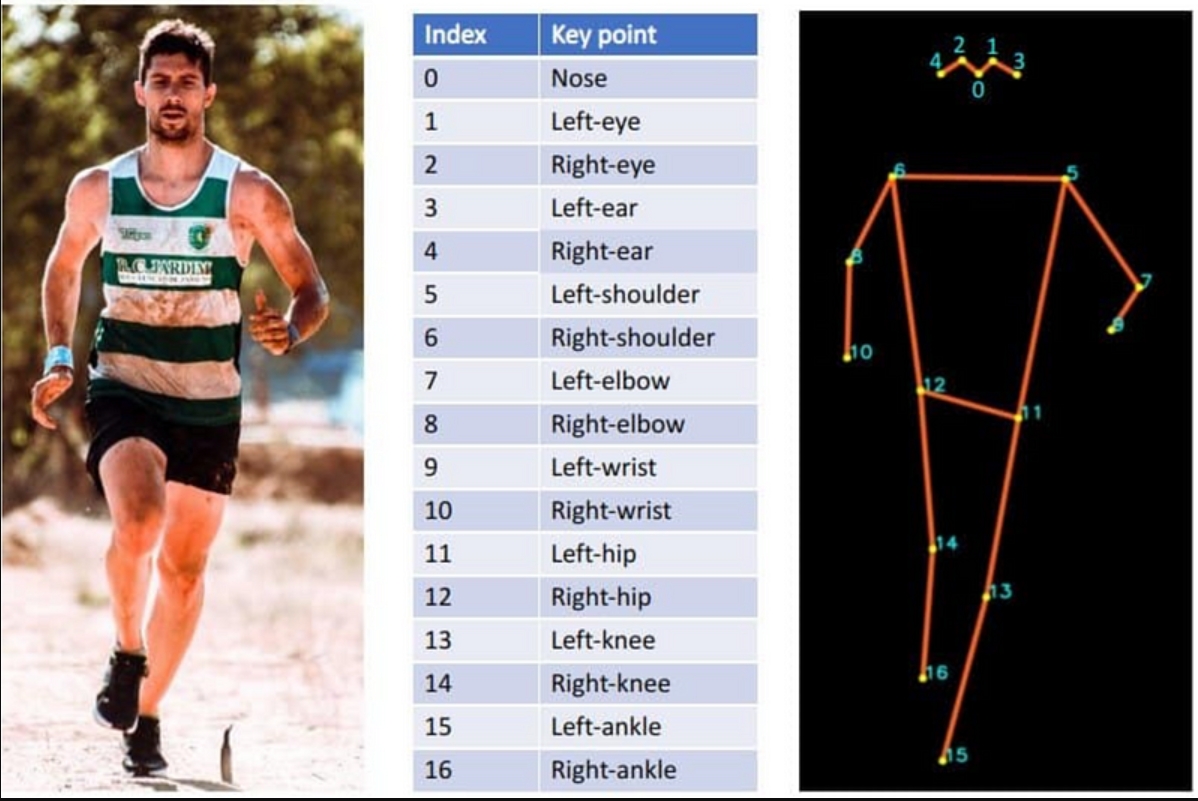
分别对应着:
0.鼻子
1.左眼
2.右眼
3.左耳
4.右耳
5.左肩
6.右肩
7.左肘
8.右肘
9.左腕
10.右手腕
11.左髋关节
12.右髋关节
13.左膝
14.右膝盖
15.左脚踝
16.右脚踝
图片推理
准备图片
cp /opt/bros/humble/share/jobot_infer_py/data/detection/test.jpg .
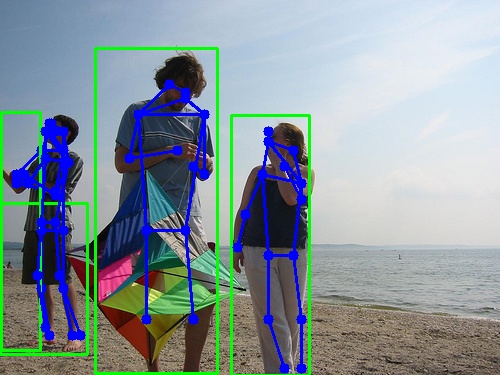
本地保存推理结果
ros2 launch br_perception infer_img.launch.py \
config_path:='config/pose/yolov8_pose.yaml' \
img_path:='./test.jpg'
输出结果将保存在当前目录的 pose_result.jpg 中,如图所示。
终端打印如下
bianbu@bianbu:~$ ros2 launch br_perception infer_img.launch.py config_path:='config/pose/yolov8_pose.yaml' img_path:='./test.jpg'
[INFO] [launch]: All log files can be found below /home/bianbu/.ros/log/2025-07-29-11-38-09-728349-bianbu-13624
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [infer_img_node-1]: process started with pid [13631]
[infer_img_node-1] All model files already exist and do not need to be downloaded
[infer_img_node-1] all time cost:0.11103701591491699
[infer_img_node-1]
[infer_img_node-1] Person 0, [xmin:0, ymin:203, width:87, height:151], conf 0.42
[infer_img_node-1] nose: (49.0, 131.0), vis=1.32
[infer_img_node-1] left_eye: (55.0, 131.0), vis=1.32
[infer_img_node-1] right_eye: (49.0, 123.0), vis=1.32
[infer_img_node-1] left_ear: (63.0, 131.0), vis=1.32
[infer_img_node-1] right_ear: (49.0, 131.0), vis=0.00
[infer_img_node-1] left_shoulder: (63.0, 150.0), vis=1.32
[infer_img_node-1] right_shoulder: (41.0, 150.0), vis=1.32
[infer_img_node-1] left_elbow: (55.0, 191.0), vis=1.32
[infer_img_node-1] right_elbow: (16.0, 174.0), vis=1.32
[infer_img_node-1] left_wrist: (16.0, 183.0), vis=1.32
[infer_img_node-1] right_wrist: (16.0, 174.0), vis=1.32
[infer_img_node-1] left_hip: (63.0, 230.0), vis=1.32
[infer_img_node-1] right_hip: (41.0, 230.0), vis=1.32
[infer_img_node-1] left_knee: (63.0, 288.0), vis=1.32
[infer_img_node-1] right_knee: (41.0, 288.0), vis=1.32
[infer_img_node-1] left_ankle: (80.0, 335.0), vis=1.32
[infer_img_node-1] right_ankle: (49.0, 335.0), vis=1.32
[infer_img_node-1]
[infer_img_node-1] Person 1, [xmin:1, ymin:112, width:39, height:238], conf 0.85
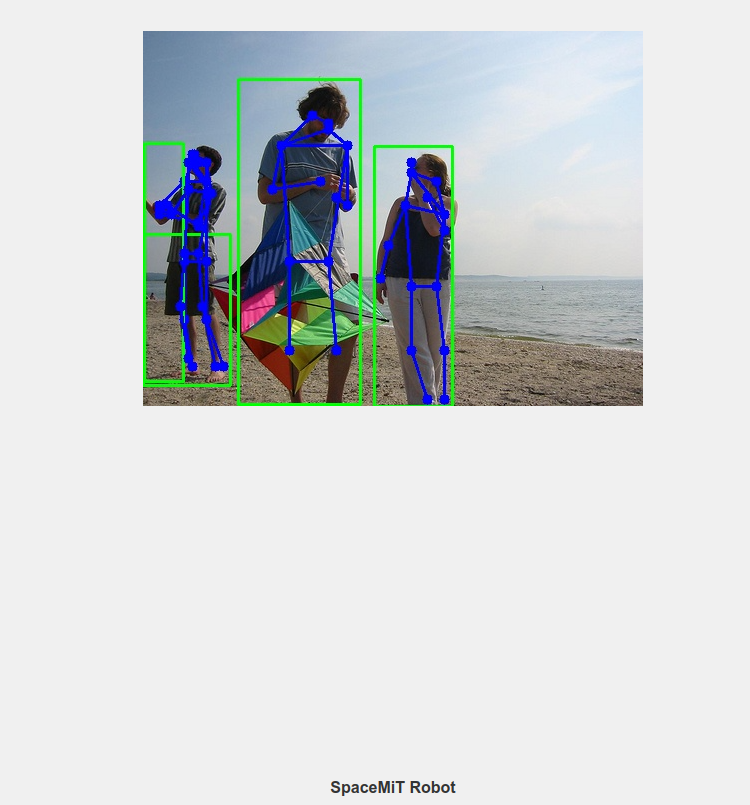
Web 可视化推理结果
启动推理发布节点(终端 1):
ros2 launch br_perception infer_img.launch.py \
config_path:='config/pose/yolov8_pose.yaml' \
img_path:='./test.jpg' \
publish_result_img:=true \
result_img_topic:='result_img' \
result_topic:='/inference_result'
启动 Web 可视化服务(终端 2):
ros2 launch br_visualization websocket_cpp.launch.py image_topic:='/result_img'
终端提示访问地址:
...
Please visit in your browser: http://<IP>:8080
...
打开浏览器输入 http://<IP>:8080,即可查看实时推理图像结果。
输入 ros2 topic echo /inference_result 查看推理结果话题
使用以下代码实现简单的话题订阅
import rclpy
from rclpy.node import Node
from std_msgs.msg import Header
from jobot_ai_msgs.msg import DetectionPoseResultArray
class PoseSubscriber(Node):
def __init__(self):
super().__init__('pose_subscriber')
self.subscription = self.create_subscription(
DetectionPoseResultArray,
'/inference_result', # 话题名,根据实际情况改
self.listener_callback,
10 # QoS
)
def listener_callback(self, msg):
self.get_logger().info(f"Received pose results: {len(msg.results)} persons")
for det_id, res in enumerate(msg.results):
self.get_logger().info(
f"\nPerson {det_id}, [xmin:{res.x_min}, ymin:{res.y_min}, "
f"width:{res.width}, height:{res.height}], conf {res.conf:.2f}"
)
for i in range(len(res.keypoint_ids)):
name = f"kp_{res.keypoint_ids[i]}"
x = res.keypoint_xs[i]
y = res.keypoint_ys[i]
conf = res.keypoint_confs[i]
self.get_logger().info(f" {name}: ({x:.1f}, {y:.1f}), vis={conf:.2f}")
def main(args=None):
rclpy.init(args=args)
node = PoseSubscriber()
rclpy.spin(node)
node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
参数说明
infer_img.launch.py 的参数说明
| 参数名称 | 作用 | 默认值 |
|---|---|---|
| config_path | 配置推理时使用的模型 | config/detection/yolov6.yaml |
| img_path | 推理时使用的图片路径 | data/detection/test.jpg |
| publish_result_img | 是否以图像消息的形式发布推理结果 | false |
| result_img_topic | 发布的渲染图像消息名,publish_result_img为true时才有效 | /result_img |
| result_topic | 发布的推理结果消息名 | /inference_result |
视频流推理
启动相机(USB 示例)
ros2 launch br_sensors usb_cam.launch.py video_device:="/dev/video20"
启动推理并发布结果
启动推理(终端 1):
ros2 launch br_perception infer_video.launch.py \
config_path:='config/pose/yolov8_pose.yaml' \
sub_image_topic:='/image_raw' \
publish_result_img:=true \
result_topic:='/inference_result'
Web 显示(终端 2)�:
ros2 launch br_visualization websocket_cpp.launch.py image_topic:='/result_img'
终端提示访问地址:
...
Please visit in your browser: http://<IP>:8080
...
打开浏览器输入 http://<IP>:8080,即可查看实时推理图像结果。
无可视化(仅数据输出)
如果你只想要拿到模型推理的结果,运行下述命令:
ros2 launch br_perception infer_video.launch.py \
config_path:='config/pose/yolov8_pose.yaml' \
sub_image_topic:='/image_raw' \
publish_result_img:=false \
result_topic:='/inference_result'
结果订阅
输入 ros2 topic echo /inference_result 查看推理结果话题
使用以下代码实现简单的话题订阅
import rclpy
from rclpy.node import Node
from std_msgs.msg import Header
from jobot_ai_msgs.msg import DetectionPoseResultArray
class PoseSubscriber(Node):
def __init__(self):
super().__init__('pose_subscriber')
self.subscription = self.create_subscription(
DetectionPoseResultArray,
'/inference_result', # 话题名,根据实际情况改
self.listener_callback,
10 # QoS
)
def listener_callback(self, msg):
self.get_logger().info(f"Received pose results: {len(msg.results)} persons")
for det_id, res in enumerate(msg.results):
self.get_logger().info(
f"\nPerson {det_id}, [xmin:{res.x_min}, ymin:{res.y_min}, "
f"width:{res.width}, height:{res.height}], conf {res.conf:.2f}"
)
for i in range(len(res.keypoint_ids)):
name = f"kp_{res.keypoint_ids[i]}"
x = res.keypoint_xs[i]
y = res.keypoint_ys[i]
conf = res.keypoint_confs[i]
self.get_logger().info(f" {name}: ({x:.1f}, {y:.1f}), vis={conf:.2f}")
def main(args=None):
rclpy.init(args=args)
node = PoseSubscriber()
rclpy.spin(node)
node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
参数说明
infer_video.launch.py 的参数说明
| 参数名称 | 作用 | 默认值 |
|---|---|---|
| config_path | 配置推理时使用的模型 | config/detection/yolov6.yaml |
| sub_image_topic | 订阅的图像消息话�题名 | /image_raw |
| publish_result_img | 是否以图像消息的形式发布推理结果 | false |
| result_img_topic | 发布的渲染图像消息名,publish_result_img为true时才有效 | /result_img |
| result_topic | 发布的推理结果消息名 | /inference_result |