OCR 光学字符识别
PaddleOCR 简介
PaddleOCR(简称 PPOCR)是由百度飞桨(PaddlePaddle)团队开源的一个端到端文字识别(OCR)系统,致力于提供**“从文本检测 → 方向分类 → 文本识别 → 后处理”** 的完整解决方案。 它不仅支持中英文、多语言场景,还广泛适用于文档、票据、路牌、车牌、自然场景等 OCR 应用。
本示例展示如何基于 SpacemiT 智算核,使用图片或ROS2消息作为输入,执行 OCR 模型的推理,并通过 ROS 2 发布检测结果。
环境准备
建议使用 ROS2_LXQT 系统,并确保已经安装了开发依赖
安装依赖
sudo apt install python3-opencv ros-humble-cv-bridge ros-humble-camera-info-manager \
ros-humble-image-transport python3-spacemit-ort python3-pyclipper
导入 ROS2 环境
source /opt/bros/humble/setup.bash
图片推理
准备图片
cp /opt/bros/humble/share/jobot_ppocr_py/data/test.jpg .
本地保存推理结果
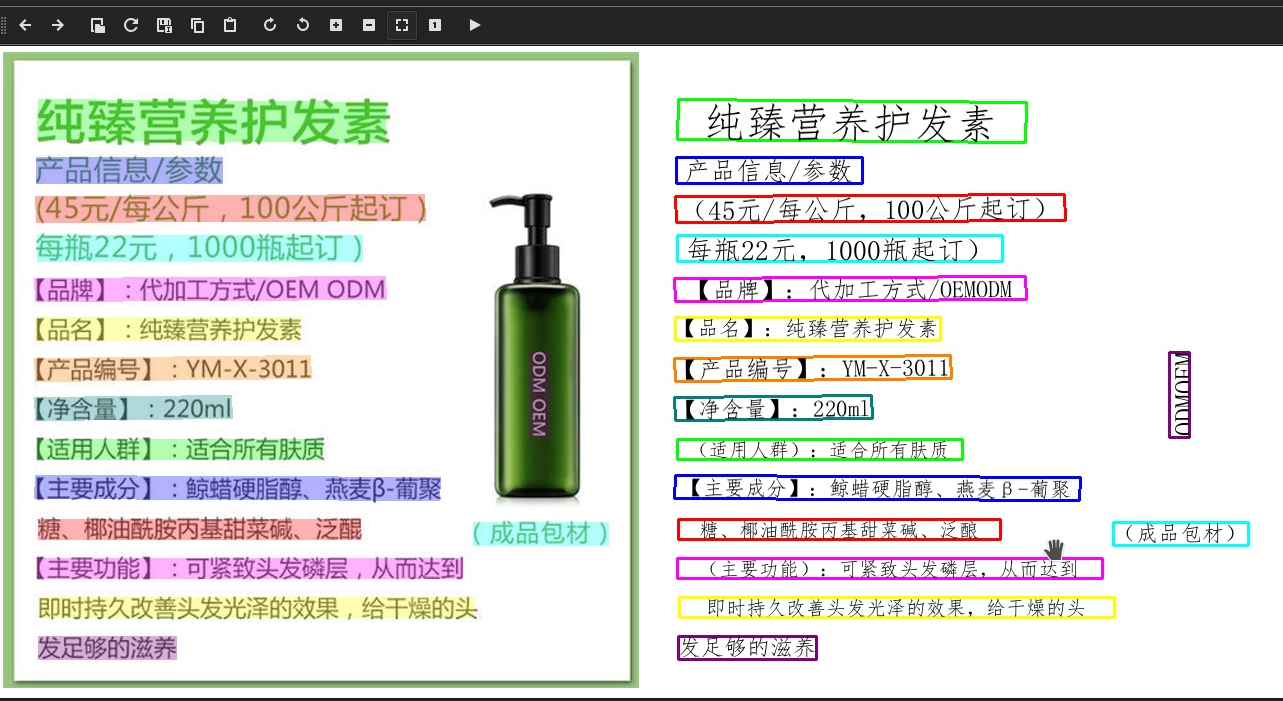
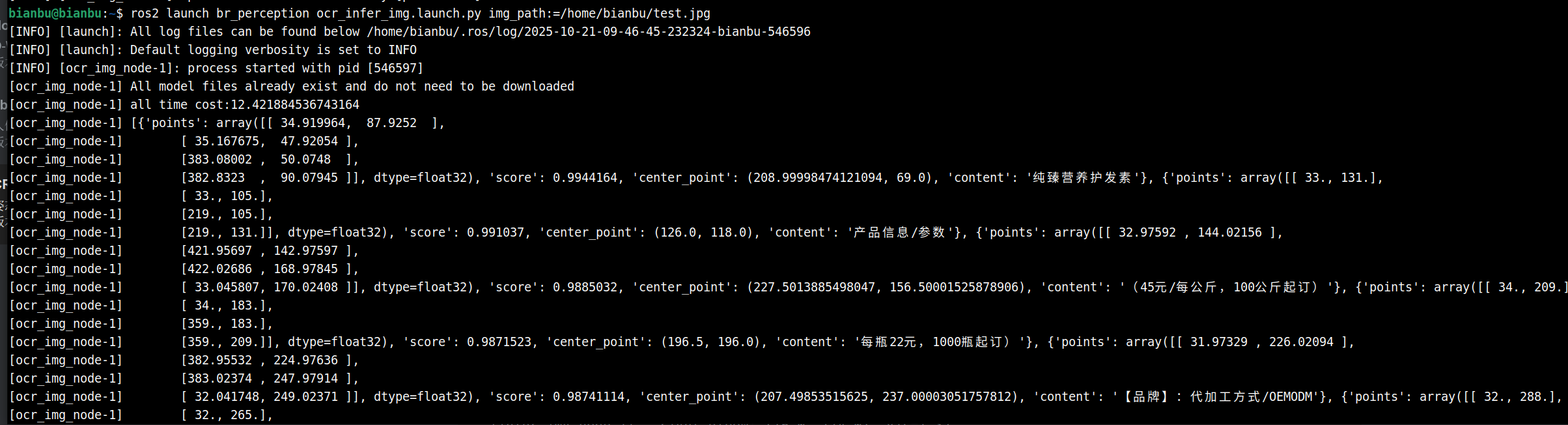
ros2 launch rdk_perception ocr_infer_img.launch.py img_path:=/home/bianbu/test.jpg
输出结果将保存在当前目录的 ocr_result.jpg 中,如图所示。
终端打印如下
参数说明
ocr_infer_img.launch.py 的参数说明
| 参数名称 | 作用 | 默认值 |
|---|---|---|
| img_path | 推理时使用的图片路径 | data/test.jpg |
使用推理服务
推理服务接受原始图像消息并返回OCR推理结果,可以通过 ros2 interface show jobot_interfaces/srv/OCRInfer 查看服务定义。
开启服务
ros2 launch rdk_perception ocr_service.launch.py
终端打印:

客户端代码
编写客户端代码
import rclpy
from rclpy.node import Node
from sensor_msgs.msg import Image
from jobot_interfaces.srv import OCRInfer
import cv2
import numpy as np
class OCRClient(Node):
def __init__(self):
super().__init__('ocr_client')
self.client = self.create_client(OCRInfer, 'ocr_infer')
while not self.client.wait_for_service(timeout_sec=1.0):
self.get_logger().info('Waiting for OCR service...')
self.get_logger().info('OCR service connected.')
def send_request(self, img_path):
req = OCRInfer.Request()
img = cv2.imread(img_path)
img_msg = Image()
img_msg.height, img_msg.width, _ = img.shape
img_msg.encoding = 'bgr8'
img_msg.step = img_msg.width * 3
img_msg.data = img.tobytes()
req.image = img_msg
future = self.client.call_async(req)
rclpy.spin_until_future_complete(self, future)
resp = future.result()
print(f"Detected {len(resp.result.boxes)} boxes.")
result_img = self.ros_img_to_cv2(resp.result_img)
cv2.imwrite('ocr_result_srv.jpg', result_img)
print("Saved OCR result image to ocr_result_srv.jpg")
def ros_img_to_cv2(self, ros_img: Image):
img = np.frombuffer(ros_img.data, dtype=np.uint8).reshape(ros_img.height, ros_img.width, 3)
return img
def main():
rclpy.init()
client = OCRClient()
client.send_request('test.jpg')
client.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
注意确保这里的图像路径正确。
请求服务
客户端代码保存为 ocr_client.py
然后执行:
python3 ocr_client.py
终端打印:

结果可视化文件保存在 ocr_result_srv.jpg