6.5.1. Human-Following AGV
Last Version: 19/09/2025
Watch the Demo Video
Overview
This demo showcases the K1 platform controlling an AGV to perform multimodal interaction and autonomous navigation.
The system is deeply integrated with the ROS 2 framework, enabling:
- High-precision path planning
- Dynamic obstacle avoidance
- Reliable human-following capabilities
Using a Function Call architecture, the AGV supports real-time voice commands, allowing users to interact naturally.
This solution combines environment sensing, motion control, and voice interaction into an intelligent human–machine collaboration system. It highlights the potential of K1-based AGVs for smart home service and industrial applications.
Hardware
- 1 x K1 Development Board (with power supply)
- 1 x Wheeltec Educational ROS AGV
- 1 x Monocular Camera
- 1 x Ring Microphone
- 1 x USB Sound Card or Speaker
System Framework and Control Flow
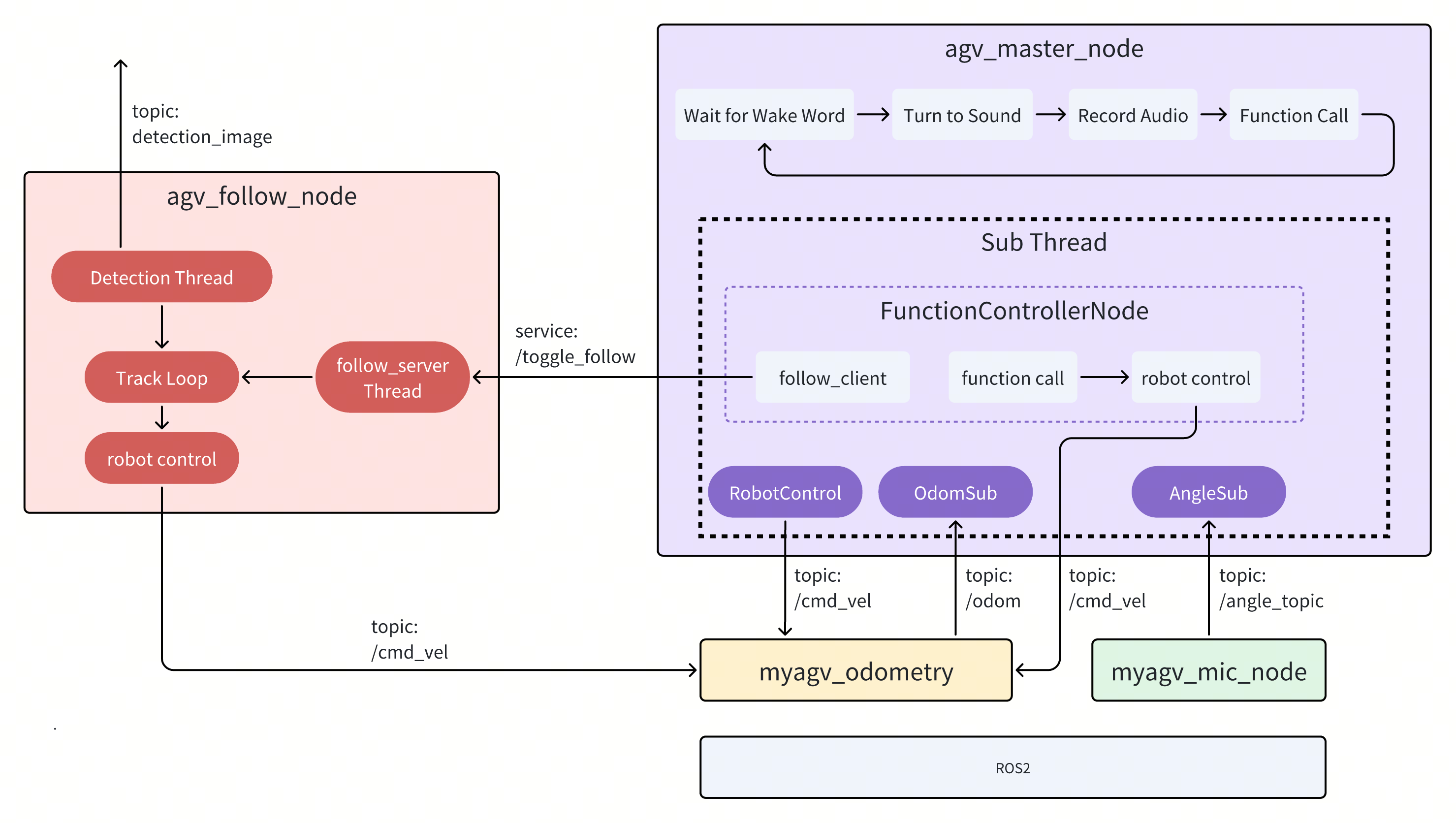
The figure above shows the overall framework and process control of the AGV human-following case in the ROS2 system. It is mainly composed of the following four nodes:
-
agv_master_nodeMaster control node, responsible for overall process management.- Listens to the
/angle_topictopic to obtain wake-up status and wake-up angle information; - Publishes to the
/cmd_veltopic to control the AGV to turn to the target angle; - Calls
spacemit_audio/record.pyto perform recording, and executes function calls based on the recording (managed by the FunctionControllerNode); - Decides whether to start following based on the voice command result (triggered via the
/toggle_followservice); - Other control commands are published directly through
/cmd_vel.
- Listens to the
-
agv_follow_nodeVisual-following node, responsible for tracking the target person.- The vision thread detects the person closest to the center in the image and publishes the
/detection_imagetopic to the main thread; - The main thread calculates and publishes
/cmd_velto control AGV velocity based on detection data; - The service thread listens to the
/toggle_followservice to control whether following is enabled.
- The vision thread detects the person closest to the center in the image and publishes the
-
myagv_mic_nodeMicrophone node, responsible for sound source localization and voice wake-up.- Performs sound source detection and publishes
/angle_topic(including angle + wake-up status).
- Performs sound source detection and publishes
-
myagv_odometryChassis node, provides the robot car’s position (/odom) and receives control commands (/cmd_vel).- Moves the AGV according to
/cmd_vel; - Publishes
/odomfor the master control node to determine orientation; - Can be replaced with a real or simulated chassis control module.
- Moves the AGV according to
Environment Setup
Follow these steps to set up the environment for the AGV human-following system.
Step 1: Download the Main Program Code
Clone the main program repository:
git clone https://github.com/elephantrobotics/jobot-ai-elephant.git ~/
Step 2: Install System Dependencies
Update the system and install required libraries:
sudo apt update
sudo apt install -y \
libopenblas-dev \
portaudio19-dev \
python3-dev \
ffmpeg \
python3-spacemit-ort \
libcjson-dev \
libasound2-dev
Step 3: Install ROS 2 Dependencies
-
Install dependency ROS 2 packages
sudo apt install -y ros-dev-tools ros-humble-ros-base python3-venv ros-humble-xacro \
ros-humble-joint-state-publisher ros-humble-'tf2*' \
ros-humble-'nav*' ros-humble-slam-toolbox ros-humble-tf-transformations -
Build the AGV’s ROS 2 package:
mkdir -p ~/agv_ws/src
cd ~/agv_ws/src
git clone https://gitee.com/cookieee/agv-elephant-ros2-pkgs.git
cd ~/agv_ws/
source /opt/ros/humble/setup.zsh
colcon build
Step 4: Install Python Dependencies
-
Create a Python virtual environment:
virtualenv ~/audio-env -
Configure the pip source to use the SpacemiT mirror
pip config set global.extra-index-url https://git.spacemit.com/api/v4/projects/33/packages/pypi/simple
pip config set --extra-index-url https://mirrors.tuna.tsinghua.edu.cn/pypi/web/simple -
Install Python dependencies:
cd ~/jobot-ai-elephant/spacemit_audio
source ~/audio-env/bin/activate
pip install -r requirements.txt
# Install OpenCV dependencies
pip install lap transforms3d cython-bbox opencv-python==4.6.8.1
Step 5: Configure Device Rules (udev)
-
Set up udev rules to map hardware devices to system device indices
echo 'KERNEL=="ttyACM*", ATTRS{idVendor}=="1a86", ATTRS{idProduct}=="55d4",MODE:="0777",SYMLINK+="wheeltec_mic"' >/etc/udev/rules.d/myagv_mic.rules
echo 'KERNEL=="ttyACM*", ATTRS{idVendor}=="1a86", ATTRS{idProduct}=="55d3",MODE:="0777",SYMLINK+="agv_odom"' >/etc/udev/rules.d/myagv_odom.rules
echo 'KERNEL=="ttyUSB*", ATTRS{idVendor}=="1a86", ATTRS{idProduct}=="7523",MODE:="0777",SYMLINK+="agv_lidar"' >/etc/udev/rules.d/myagv_lidar.rules -
Apply the rules:
sudo udevadm control --reload-rules
sudo udevadm trigger
Step 6: Compile the YDLidar SDK
Compile and install the YDLidar SDK for LiDAR support:
git clone https://github.com/YDLIDAR/YDLidar-SDK.git ~
cd ~/YDLidar-SDK
mkdir build && cd build
cmake ..
cmake --build . -- -j8
sudo cmake --install .
Step 7: Set Audio Permissions
Run the following command to add the current user to the audio group, granting access to and management of audio devices:
sudo usermod -aG audio $USER
Launch the Program
Follow these steps to start the AGV human-following system.
Step 1: Start ROS
-
Source the ROS environment
source /opt/ros/humble/setup.zsh
source ~/agv_ws/install/setup.zsh -
Launch the chassis control node
ros2 launch myagv_odometry myagv_only_move.launch.py -
Start the voice wake-up service
ros2 run jobot_mic myagv_mic_node
Step 2: Start Python Nodes
-
Source the ROS environment
source /opt/ros/humble/setup.zsh -
Activate the Python virtual environment
source ~/audio-env/bin/activate -
Launch the following node
cd ~/jobot-ai-elephant
python agv_follow_node.py -
Launch the AI pipeline node:
cd ~/jobot-ai-elephant
python agv_master_node.py
Notes
-
Wake-Up Phrase: Say "Xiao Wei Xiao Wei" to activate the system.
- For each wake-up, the AGV stops its current movement, rotates toward the sound source, and starts recording (up to 5 seconds).
-
Voice Commands:
- "Follow me"
- "Stop following"
- "Spin in place"
- "Move forward"
- "Move backward"
- "Move forward two steps"
- "Move backward two steps"
- "Turn left"
- "Turn right"