5.5.4 小车人体跟随
简介
本小节演示小车人体跟随功能,该功能由 USB相机图像采集、人体检测、速度决策等部分组成。为了方便,这里通过 Gazebo 仿真环境观察小车的运动效果。你也可以将它运用于具备 ROS2 底盘速度控制能力的实际小车。
其中 人体跟随算法 运行在 SpaceMiT RISC-V系列板子上。仿真小车模型、Gazebo仿真环境运行在板子同��一网段的PC上。
支持平台
| 平台类型 | 操作系统 |
|---|---|
| SpaceMiT RISC-V 系列板 | bianbu desktop 24.04 (Humble) |
| x86 平台 | Ubuntu 22.04 (Humble) |
平台要求
SpaceMiT RISC-V
(1)已烧录 bianbu desktop 24.04 系统镜像;
(2)已完成 Bianbu Robot SDK 安装。
x86 平台
(1)已安装 Ubuntu 22.04;
(2)已配置 ROS2 Humble 及 Bianbu Robot SDK 环境。
(3)安装小车模型与Gazebo仿真环境:
sudo apt install ros-humble-gazebo*
sudo apt install ros-humble-turtlebot3
sudo apt install ros-humble-turtlebot3-gazebo
sudo apt install ros-humble-turtlebot3-bringup
sudo apt install ros-humble-turtlebot3-simulations
使用介绍
启动仿真环境
输入以下命令加载机器人模型,并启动Gazebo仿真环境。
source /opt/ros/humble/setup.bash
export TURTLEBOT3_MODEL=burger
ros2 launch turtlebot3_gazebo empty_world.launch.py
成功启动后,仿真环境如下图所示:
启动人体跟随
在 SpaceMiT RISC-V 板子上启动 人体跟随算法,启动前请确保 USB 相机已经接入。
小车跟随策略是选择距离中心最近的目标,直到跟随到较近的距离后停止,线速度默认 0.1 m/s,角速度默认 0.37 rad/s,可以通过launch文件参数配置。
硬件连接

设备号可以如下查看:
➜ ~ ls /dev/video*
/dev/video0 /dev/video10 /dev/video12 /dev/video14 /dev/video16 /dev/video18 /dev/video2 /dev/video21 /dev/video4 /dev/video50 /dev/video6 /dev/video8 /dev/video-dec0
/dev/video1 /dev/video11 /dev/video13 /dev/video15 /dev/video17 /dev/video19 /dev/video20 /dev/video3 /dev/video5 /dev/video51 /dev/video7 /dev/video9
反复插拔一下即可确认设备号,程序内默认的设备号是 /dev/video20
启动跟随节点
一个终端:
# 导入 ROS2 环境
source /opt/bros/humble/setup.bash
ros2 launch br_application agv_person_follow.launch.py
输出如下:
[INFO] [launch]: All log files can be found below /home/zq-pi/.ros/log/2025-06-12-16-07-34-737169-spacemit-k1-x-MUSE-Pi-board-89537
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [agv_follow_node-1]: process started with pid [89544]
[agv_follow_node-1] [INFO] [1749715663.222242636] [agv_follow_node]: AI 跟踪控制服务已启动, 当前状态为暂停
为了适应多任务处理的场景,跟随节点启动了一个可以控制是否跟随的服务。
你可以在终端快速开启该服务:
source /opt/bros/humble/setup.bash
ros2 service call /toggle_follow std_srvs/srv/SetBool "{data: true}"
跟踪节点会打印:
[agv_follow_node-1] [INFO] [1749715842.691932191] [agv_follow_node]: 收到请求: data=True -> AI 跟踪模块已开启
关闭服务可以使用:
ros2 service call /toggle_follow std_srvs/srv/SetBool "{data: false}"
在代码里使用该服务:
import rclpy
from rclpy.node import Node
from std_srvs.srv import SetBool
class FollowClient(Node):
def __init__(self):
super().__init__('follow_control_client')
self.cli = self.create_client(SetBool, 'toggle_follow')
# 等待服务启动
while not self.cli.wait_for_service(timeout_sec=1.0):
self.get_logger().info('等待 toggle_follow 服务中...')
def send_request(self, enable: bool):
req = SetBool.Request()
req.data = enable
future = self.cli.call_async(req)
rclpy.spin_until_future_complete(self, future)
if future.result() is not None:
self.get_logger().info(f'响应: success={future.result().success}, message="{future.result().message}"')
else:
self.get_logger().error('服务调用失败')
def main():
rclpy.init()
client = FollowClient()
client.send_request(True) # 发送 True 表示开启跟踪
client.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
跟随节点终端打印:
[agv_follow_node-1] cmd_vel -- linear_x:0.0, angular_z:0.0
[agv_follow_node-1] cmd_vel -- linear_x:0.0, angular_z:0.0
[agv_follow_node-1] cmd_vel -- linear_x:0.4, angular_z:0.0
[agv_follow_node-1] cmd_vel -- linear_x:0.4, angular_z:0.0
[agv_follow_node-1] cmd_vel -- linear_x:0.4, angular_z:0.0
[agv_follow_node-1] cmd_vel -- linear_x:0.4, angular_z:0.0
[agv_follow_node-1] cmd_vel -- linear_x:0.4, angular_z:0.0
你可以远离相机,或左右摆动,你应该可以看到小车在Gazebo运动。
查看检测结果
如果你想查看人体目标检测的结果,需要调整启动launch文件的参数如下:
ros2 launch br_application agv_person_follow.launch.py publish_result_img:=true
话题发布到 /detection_image
你可以在 PC 上运行 ros2 run rqt_image_view rqt_image_view 来查看。
可配置的参数
agv_person_follow.launch.py 的参数说明
| 参数名称 | 作用 | 默认值 |
|---|---|---|
| video_device | 设置相机设备号 | /dev/video20 |
| publish_result_img | 是否发布目标检测结果 | False |
| linear_x | 跟随时的线速度 | 0.4(单位 m/s) |
| angular_z | 跟随时的角速度 | 0.37(单位 rad/s) |
实际小车人体跟随
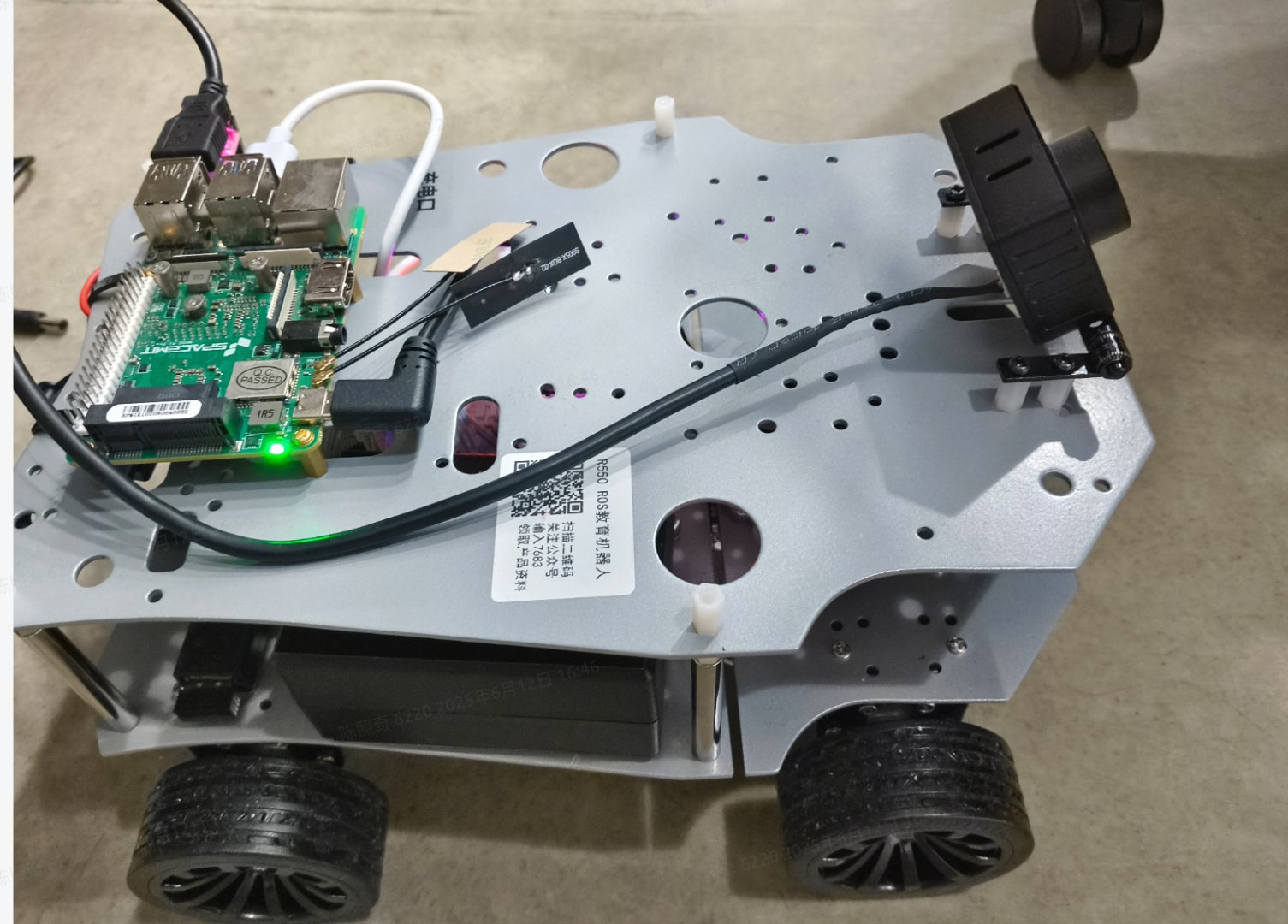
在实际的小车中,相机需要具有一定的仰角,这样识别的效果较好。