5.5.3 动态跟随目标
简介
本示例演示在搭载了SpaceMiT RISC-V的实际机器人小车上,通过相机AI视觉检测人像并实现navigation2动态跟随。
SpaceMiT RISC-V中提供了四种方案实现机器人动态跟随人像目标:
| 对比项 | yolov6检测跟随 | nanotrack跟随 | bytetrack跟随 | yolov8pose跟随 |
|---|---|---|---|---|
| 目标检测 | yolov6 | yolov6(仅初始化) | yolov8 | yolov8-pose |
| 人像跟踪 | / | nano-track | byte-track | / |
| 位置估计 | 人像框解算 | 人像框解算 | 人像框解算 | 关节点解算 |
| 动态跟随 | follow_point | follow_point | follow_point | follow_point |
| 运行负载 | 较低 | 中等 | 较高 | 中等 |
| 运行负载 | 较低 | 中等 | 较高 | 中等 |
准备工作
(1)SpaceMiT板子烧录 bianbu desktop 24.04 系统镜像,安装 Bianbu Robot SDK 。
(2)PC端安装ros-humble、Bianbu Robot SDK。
使用介绍
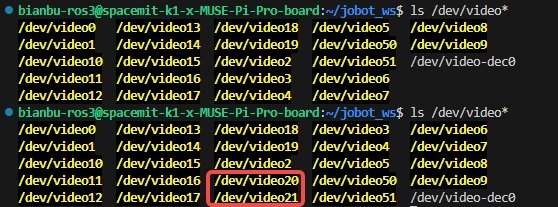
配置 USB 相机传感器
插拔相机usb接口,输入以下命令对比查看新增端口号,即为该相机输入端口
ls /dev/video*
安装navigation2
sudo apt install ros-humble-navigation2
sudo apt install ros-humble-nav2-bringup
启动相机检测节点
输入以下命令打开usb相机,端口号替换为实际相机输入端口号。
source /opt/bros/humble/setup.bash
ros2 run jobot_usb_cam jobot_usb_cam_node_exe --ros-args -p video_device:=/dev/video20
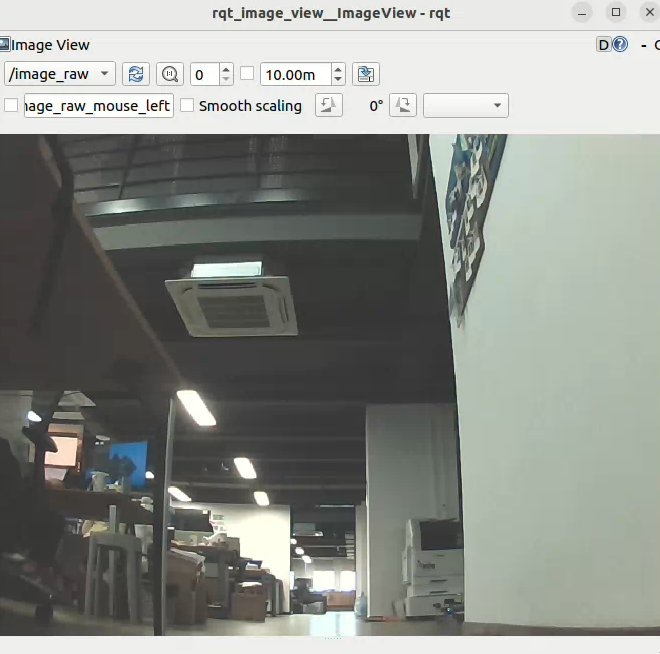
PC端打开一个终端,输入以下命令查看相机图像:
source /opt/ros/humble/setup.bash
ros2 run rqt_image_view rqt_image_view
完成以上准备工作后,根据需求选择以下一种方案即可实��现动态跟随人像目标。
以下操作如未特殊说明在PC端运行,均直接在SpaceMit板子上启动终端并运行相关命令。
目标检测、跟踪与位置解算
下述四种方案均可独立实现机器人动态跟随人像目标,可根据需求自行选择。
yolov6检测跟随
该方案通过yolov6检测人像目标获取人像框,通过像框像素值与预设参数解算人像目标位置,并使用navigation2-follow-point导航行为树实现动态跟随。
启动视觉推理节点
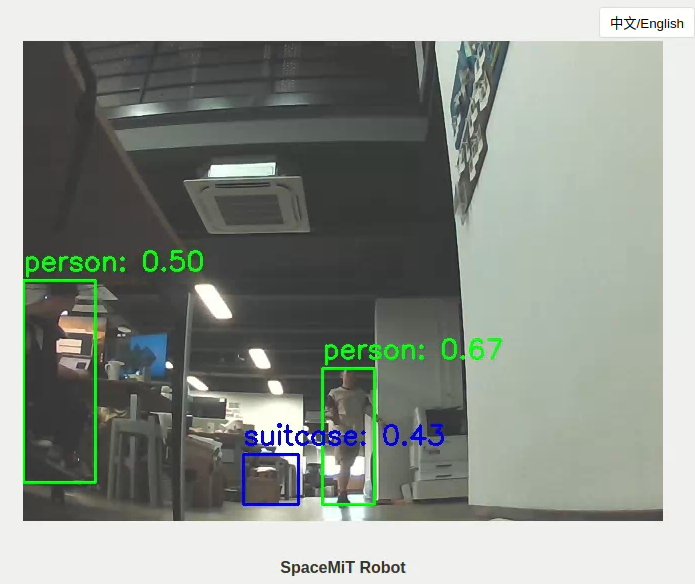
运行以下命令启动yolov6视觉推理节点,该节点会根据相机获取的图像信息,对人像目标进行持续检测和推理分类。
一个终端
source /opt/bros/humble/setup.bash
ros2 launch br_perception infer_video.launch.py config_path:='config/detection/yolov6.yaml' sub_image_topic:='/image_raw' publish_result_img:='true' result_topic:='/inference_result'
另一个终端
source /opt/bros/humble/setup.bash
ros2 launch br_visualization websocket_cpp.launch.py image_topic:='/result_img'
终端打印如下
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [websocket_cpp_node-1]: process started with pid [276081]
[websocket_cpp_node-1] Please visit in your browser: 10.0.90.219:8080
[websocket_cpp_node-1] [INFO] [1745548855.705411901] [websocket_cpp_node]: WebSocket Stream Node has started.
[websocket_cpp_node-1] [INFO] [1745548855.706897013] [websocket_cpp_node]: Server running on http://0.0.0.0:8080
[websocket_cpp_node-1] [INFO] [1745548856.281858684] [websocket_cpp_node]: WebSocket client connected.
查看websocket_cpp终端的"Please visit in your browser:",PC端打开浏览器访问10.0.90.219:8080(不同的ip这个会变) 即可看到推理结果。
启动更新动态目标位置节点
打开一个新终端,运行以下命令启动更新动态跟随目标节点。
该节点会根据AI视觉检测模块获取的人像目标像素框,解算目标位置并更新机器人的导航目标点,同时可以在rviz2中可视化跟随目标。
source /opt/bros/humble/setup.bash
ros2 launch nav_goal_send goal_update_follow_point.launch.py
相机安装于小车的前部,并根据实际情况调整合适的仰角大小,要注意过小的仰角设置不利于yolo模型的人像检测。
打开参数配置文件/opt/bros/humble/share/nav_goal_send/config/params_follow_point.yaml,查看参数如下:
pixel_w: 640 # 像素宽度
pixel_h: 480 # 像素高度
person_h: 1.7 # 人像身高
distance: 0.8 # 标定距离
width: 0.6 # 标定宽度
theta_h: 0.35 # 仰角高度
theta_d: 0.76 # 仰角距离
标定参数解释
标定距离distance:人像头顶与相机视野上侧重合时,人距离小车正前方x轴的距离
标定宽度width:在x=distance时,人朝小车y轴方向移动到人像与相机视野侧边重合,此时y轴方向的偏移宽度
仰角高度theta_h:用于标定相机下视场线仰角的参照物高度
仰角距离theta_d:将参照物在小车x轴方向移动,当相机视野下侧开始出现参照物时的距离
对于不同的相机安装位置和跟随目标,可以根据实际测量结果,通过修改上述参数配置文件来实现位置估计解算。
启动navigation2动态目标跟随
运行以下命令,即可启动follow_point模式navigation2导航,该导航模式会持续跟随相机检测到的目标位置。
source /opt/bros/humble/setup.bash
ros2 launch br_navigation nav2_follow_point.launch.py
可以通过修改/opt/bros/humble/share/br_navigation/config/behavior_trees/follow_point.xml行为树的参数distance调整跟随距离,默认值为0.5m,即机器人跟随目标中心位置的最近距离。
<Sequence>
<GoalUpdater input_goal="{goal}" output_goal="{updated_goal}">
<RetryUntilSuccessful num_attempts="3" >
<ComputePathToPose goal="{updated_goal}" path="{path}" planner_id="GridBased"/>
</RetryUntilSuccessful>
</GoalUpdater>
<TruncatePath distance="0.5" input_path="{path}" output_path="{truncated_path}"/>
</Sequence>
nanotrack跟随
第二种跟随方案通过yolo模型检测到所需跟踪的人像后,发送给nanotrack模块进行初始化,之后进行人像跟踪并发布跟踪结果,通过人像框像素值与预设参数解算人像目标位置,并使用navigation2-follow-point导航行为树实现动态跟随。
视觉追踪节点初始化
nanotrack模型需要通过yolo检测的人像框进行初始化,同时只需要初始化一次,之后跟踪模块会自动跟踪该人像。
相机节点jobot_usb_cam启动后,首先运行以下命令启动yolo检测推理,获取初始化人像框信息:
source /opt/bros/humble/setup.bash
ros2 launch br_perception infer_video.launch.py config_path:='config/detection/yolov6.yaml' sub_image_topic:='/image_raw' publish_result_img:='true' result_topic:='/inference_result_for_nanotrack'
之后运行以下命令启动nanotrack视觉追踪节点:
source /opt/bros/humble/setup.bash
ros2 launch nanotrack_ros2 nanotrack.launch.py det_topic:='/inference_result_for_nanotrack' result_topic:='/inference_result'
yolo推理节点检测到可靠的人像信息后,会自动初始化nanotrack模块,当nanotrack节点窗口出现以下连续信息打印时,即表示模块初始化成功。
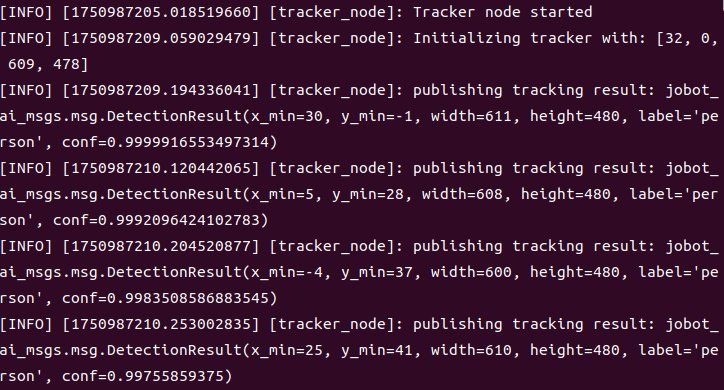
nanotrack模块初始化后,即可关闭yolov6检测推理,在终端内使用Ctrl+C关闭该节点。
注意:nanotrack为单目标跟踪模型,初始化后需要保证相机视野中有人像不丢失,否则可能会出现跟踪失败。
启动更新动态目标位置节点
打开一个新终端,运行以下命令启动更新动态跟随目标节点。
该节点会根据AI视觉检测模块获取的人像目标像素框,解算目标位置并更新机器人的导航目标点,同时可以在rviz2中可视化跟随目标。
source /opt/bros/humble/setup.bash
ros2 launch nav_goal_send goal_update_follow_point.launch.py
参考yolov6检测中的说明来调整跟随目标位置估计解算的参数配置,这里不再赘述。
启动navigation2动态目标跟随
运行以下命令,即可启动follow_point模式navigation2导航,该导航模式会持续跟随相机检测到的目标位置。
source /opt/bros/humble/setup.bash
ros2 launch br_navigation nav2_follow_point.launch.py
参考yolov6检测中的说明来调整跟随距离参数配置,这里不再赘述。
bytetrack跟随
第三种方案为bytetrack跟踪,该方案在实现目标跟踪时需连续运行yolo人像推理检测模型,同时可以实现多目标跟踪。
启动yolov8检测+bytetrack跟踪节点
安装bytetrack检测所需的依赖
sudo apt install python3-scipy
sudo apt install python3-pip
sudo apt install python3-venv
创建一个虚拟环境,安装三方python包依赖
python3 -m venv ~/myenv
source ~/myenv/bin/activate
pip3 install lap cython_bbox
pip3 uninstall numpy
pip3 install numpy==1.26.4
配置环境变量
source /opt/bros/humble/setup.bash
export PYTHONPATH=~/myenv/lib/python3.12/site-packages:$PYTHONPATH
完成上述步骤并启动相机节点jobot_usb_cam后,在终端输入以下命令,即可一键启动yolov8n检测节点+bytetrack跟踪节点。
ros2 launch bytetrack_ros2 bytetrack.launch.py result_topic:='/inference_result'
bytetrack方案会同时检测并跟踪多个目标,每个目标都有自己的id识别信息。

注意:当人像信息在相机视野内丢失,再次出现时id会发生变化。
启动更新动态目标位置节点
打开一个新终端,运行以下命令启动更新动态跟随目标节点。
该节点会根据AI视觉检测模块获取的人像目标像素框,解算目标位置并更新机器人的导航目标点,同时可以在rviz2中可视化跟随目标。
source /opt/bros/humble/setup.bash
ros2 launch nav_goal_send goal_update_follow_point.launch.py
参考yolov6检测中的说明来调整跟随目标位置估计解算的参数配置,这里不再赘述。
启动navigation2动态目标跟随
运行以下命令,即可启动follow_point模式navigation2导航,该导航模式会持续跟随相机检测到的目标位置。
source /opt/bros/humble/setup.bash
ros2 launch br_navigation nav2_follow_point.launch.py
参考yolov6检测中的说明来调整跟随距离参数配置,这里不再赘述。
yolov8pose跟随
第四种方案为更加标准化的人像关节点检测+关节点解算+跟随。相较于yolov6的纯人像框位置估计解算,这种方案解算出来的跟随目标位置更加精准。
相机外参标定
针对不同的相机仰角安装位置,需要重新标定相机外参。
相机外参标定需要使用棋盘格标定板,内参与标定板尺寸参数需要在/opt/bros/humble/share/nav_goal_send/nav_goal_send/track_chessboard.py代码中设置。
# 提取相机内参参数
file_dir = get_package_share_directory('nav_goal_send')
yaml_path = os.path.join(file_dir, 'config/mono_params_k1.yaml')
with open(yaml_path, 'r') as f:
data = yaml.safe_load(f)
K_compact = data['Camera']['K'] # [fx, fy, cx, cy]
D = np.array(data['Camera']['D']) # distortion
# 棋盘格大小
pattern_size = (8, 6)
square_size = 0.025
其中相机内参文件在/opt/bros/humble/share/nav_goal_send/config/mono_params_k1.yaml中提前标定。
Camera:
K: [603.664482, 603.032498, 323.936504, 210.723506]
D: [-0.458825, 0.233490, 0.000000, 0.000000]
运行track_chessboard.py文件,即可实现对相机外参(Rcam2car)的标定。
python3 /opt/bros/humble/share/nav_goal_send/nav_goal_send/track_chessboard.py
标定后的结果会自动保存在yolov8pose方案的参数配置文件/opt/bros/humble/share/nav_goal_send/config/params_pose.yaml中。
启动yolov8pose跟踪节点
相机启动后,运行以下命令,即可启动yolov8pose跟踪节点。
source /opt/bros/humble/setup.bash
ros2 launch yolov8pose_ros2 yolov8pose.launch.py result_topic:='/inference_result'
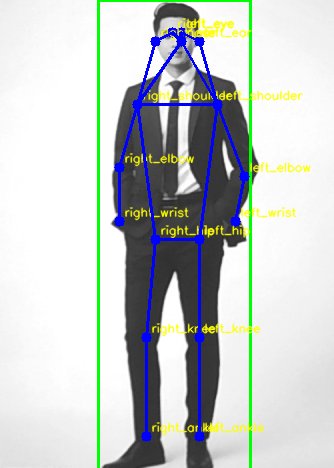
yolov8pose节点会检测人像,并将人像关节信息匹配到对应的关节点上。关节点列表:
KP_NAMES = [
"nose", "left_eye", "right_eye", "left_ear", "right_ear",
"left_shoulder", "right_shoulder", "left_elbow", "right_elbow",
"left_wrist", "right_wrist", "left_hip", "right_hip",
"left_knee", "right_knee", "left_ankle", "right_ankle"
]
在相机的检测结果里,可��以观察人像关节点与对应的关节点名称。
启动跟随目标位置关节点解算节点
标定好相机外参后,即可启动关节点解算节点计算跟随目标的位置。
该节点会根据yolov8pose视觉检测模块获取的人像关节点,解算目标位置并更新机器人的导航目标点,同时可以在rviz2中可视化跟随目标。
source /opt/bros/humble/setup.bash
ros2 launch nav_goal_send goal_update_pose.launch.py
打开参数配置文件/opt/bros/humble/share/nav_goal_send/config/params_pose.yaml,对于不同的相机安装位置,需要重新标定相机外参,跟随人像目标的预设参数也可以自行配置�。
goal_update_pose_node:
ros__parameters:
Rcam2car:
- 0.9983763694763184
- 0.03929898142814636
- -0.04123289883136749
- -0.04364486411213875
- 0.9929260611534119
- -0.1104220449924469
- 0.03660174459218979
- 0.1120423674583435
- 0.9930291175842285
person_h: 0.6 # 人高度(nose-center)
标定参数解释
Rcam2car即为标定后的相机外参,每一次调整完相机仰角都需要重新标定。
person_h为人像关节点参考实际高度,假定人像从nose关节点到center(left_hip与right_hip的中点)关节点的距离为person_h。
启动navigation2动态目标跟随
运行以下命令,即可启动follow_point模式navigation2导航,该导航模式会持续跟随相机检测到的目标位置。
source /opt/bros/humble/setup.bash
ros2 launch br_navigation nav2_follow_point.launch.py
参考yolov6检测中的说明来调整跟随距离参数配置,这里不再赘述。
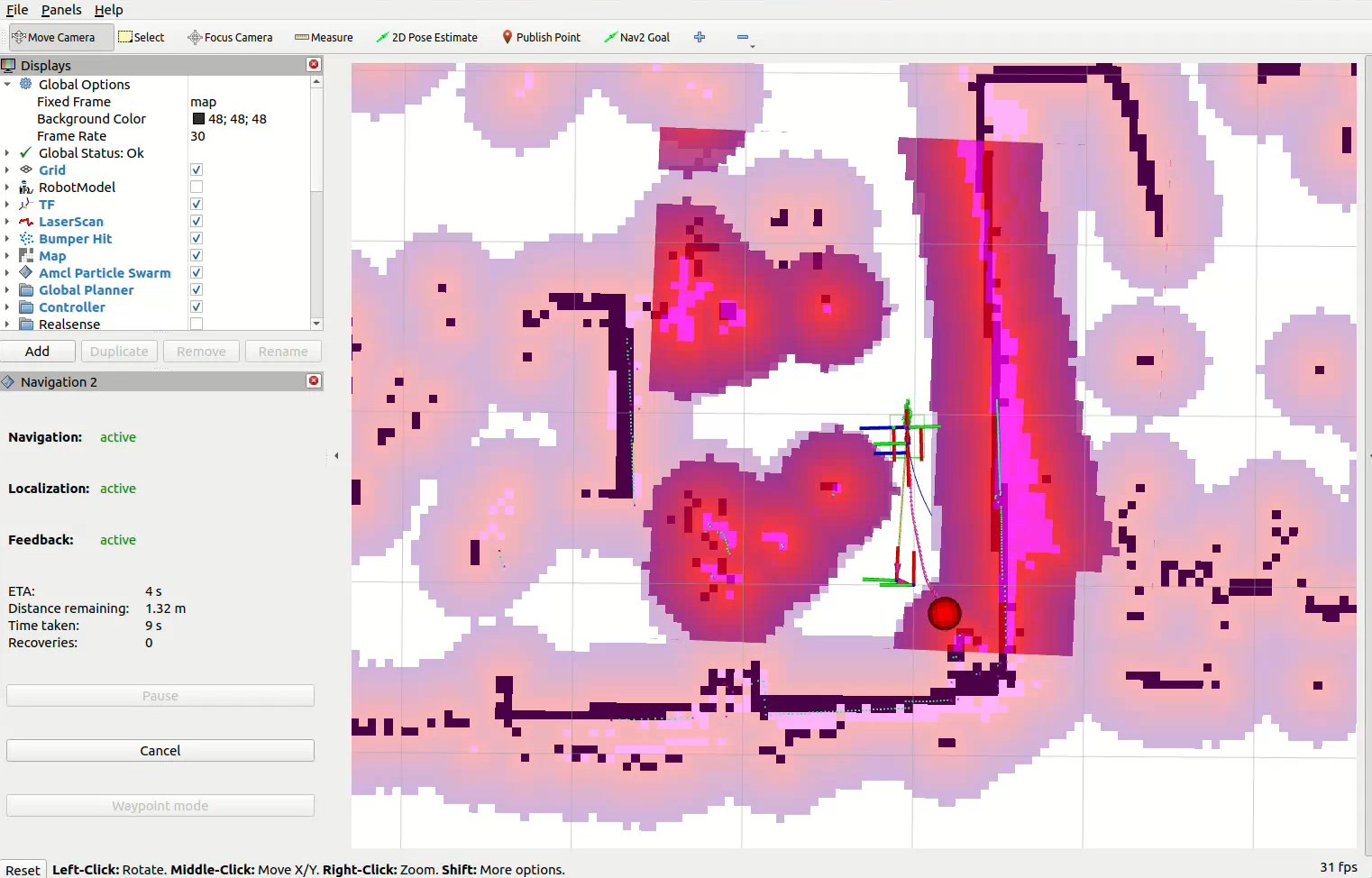
PC端可视化动态跟随效果
通过AI检测与跟踪中的任意一种方案启动跟随模式后,可以在PC端通过rviz2实时可视化跟随效果。
PC端打开新终端,输入以下命名启动rivz:
source /opt/ros/humble/setup.bash
source ~/ros2_demo_ws/install/setup.bash
ros2 launch br_visualization display_navigation.launch.py
按照下图所示顺序,依次点击add、选择By topic中/visualization_marker话题下的Marker
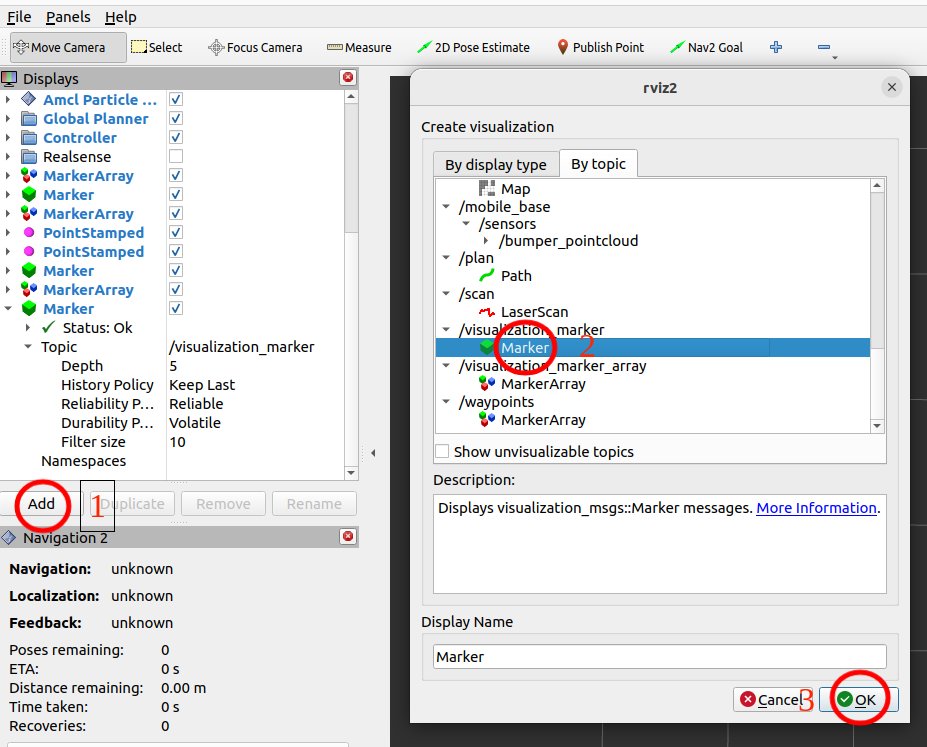
此时在rivz界面中即可实时显示检测到的人像信息,红色点即为解算出来的跟随目标位置:
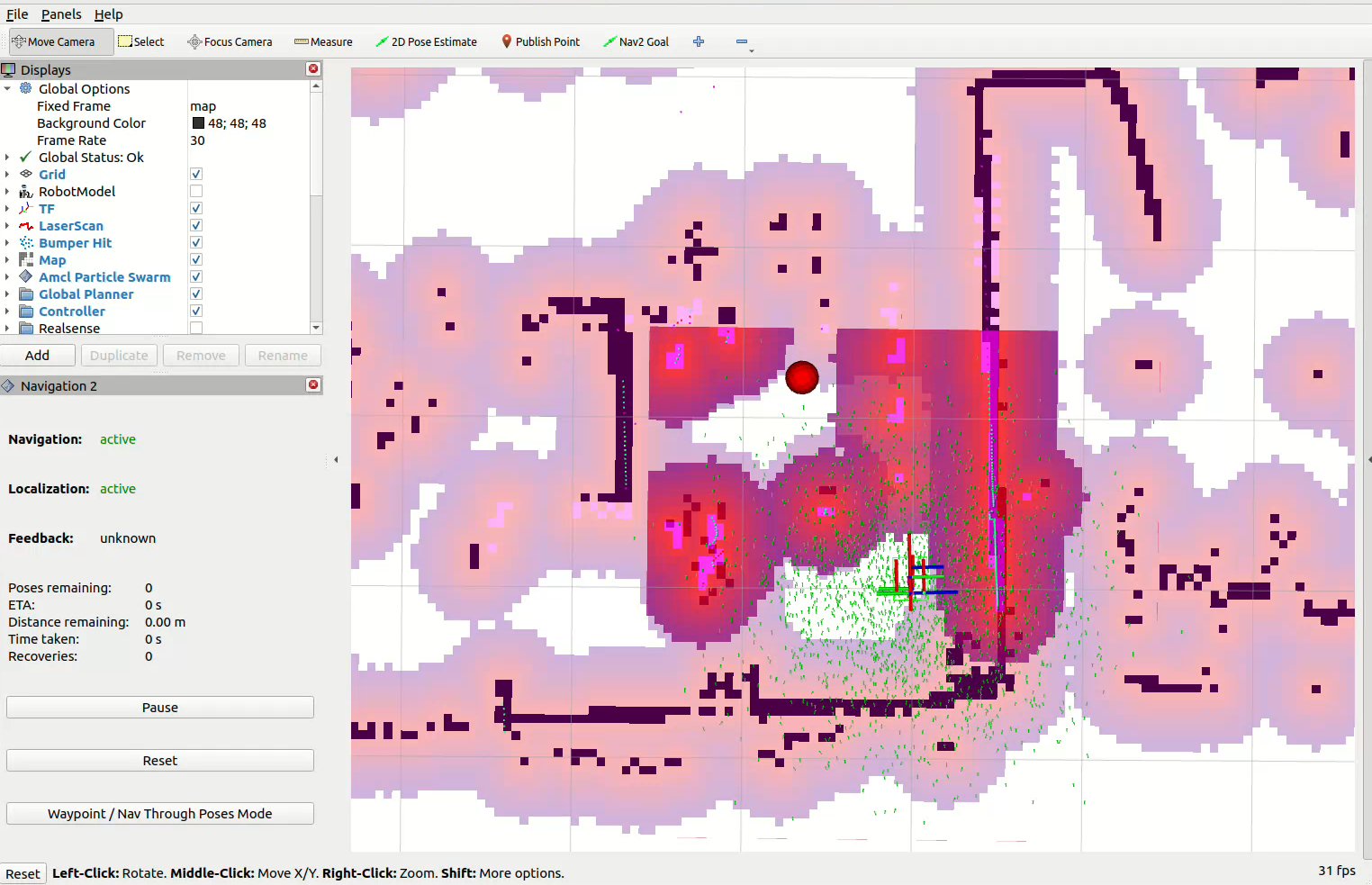
点击2D Nav Goal设置任意位置导航目标点,即可开启跟随模式navigation2。目标移动后,机器人会自动连续跟随该目标。