6.4.10 YOLO-World 物体检测
最新版本:2025/09/12
YOLO-World 模型简介
YOLO-World 是腾讯 AI Lab(AI 实验室)提出的一种实时 开放词汇(Open-Vocabulary)零样本物体检测 模型,首次发表于 2024 年初,它基于快速高效的 YOLO 系列(尤其是 Ultralytics 的 YOLOv8)架构,并结合了视觉–语言(Vision-Language)融合技术,实现无需针对每个类别单独训练即可检测任意描述的对象
本示例展示如何基于 SpacemiT 智算核,使用图片或视频流作为输入,执行 YOLO-World 模型的推理,并通过 ROS 2 发布检测结果。
环境准备
安装依赖
sudo apt install python3-venv python3-pip ros-humble-camera-info-manager \
ros-humble-image-transport python3-spacemit-ort
导入 ROS2 环境
source /opt/bros/humble/setup.bash
准备虚拟环境
python3 -m venv ~/test3
source ~/test3/bin/activate
pip install -r /opt/bros/humble/share/jobot_yolo_world/data/requirements.txt
export PYTHONPATH="$HOME/test3/lib/python3.12/site-packages":$PYTHONPATH
图片推理
准备图片
cp /opt/bros/humble/share/jobot_yolo_world/data/test2.jpg .
本地保存推理结果
ros2 launch br_perception yoloworld_infer_img.launch.py \
img_path:='./test2.jpg' \
class_names:="[fan, box]"
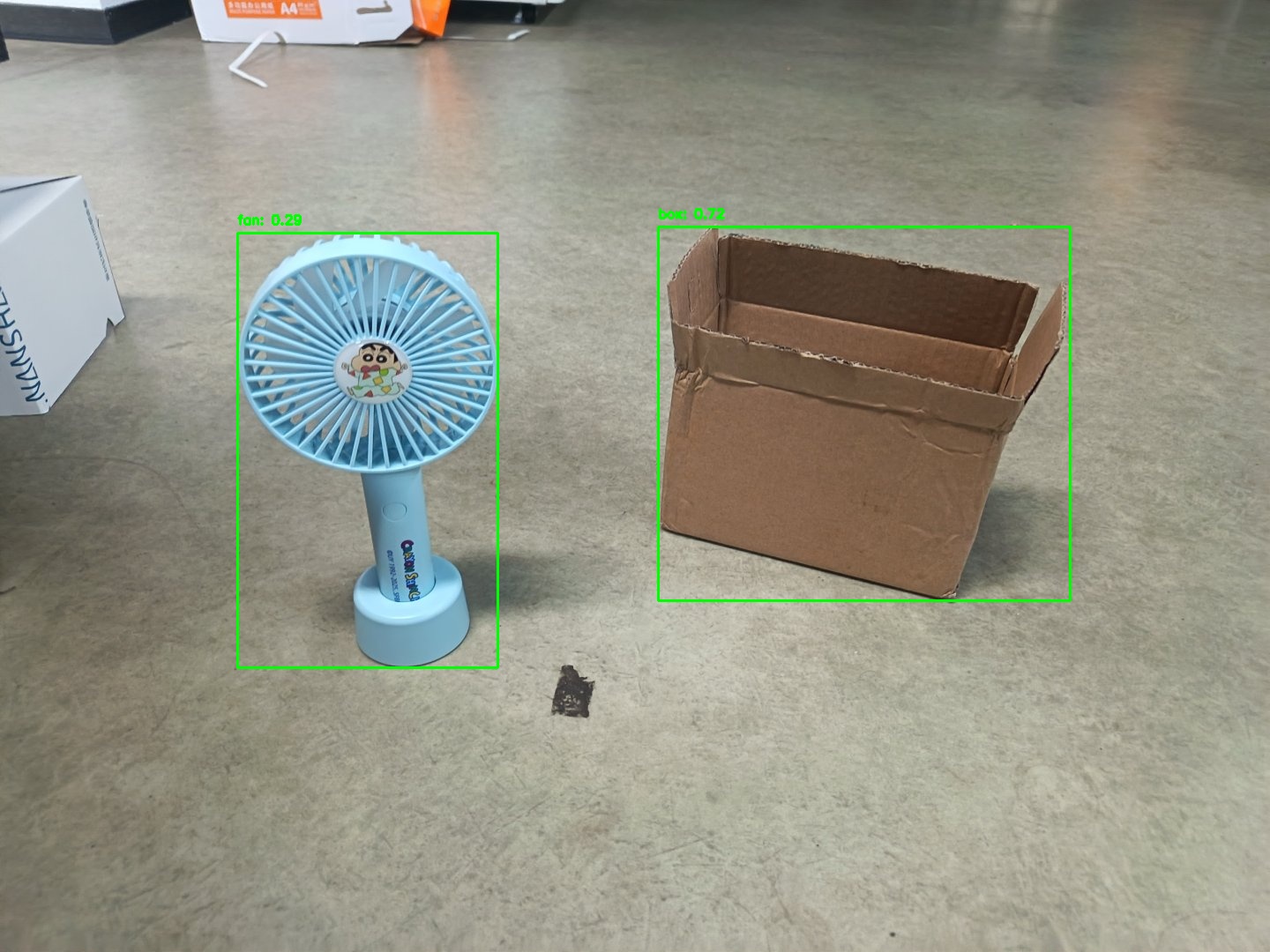
输出结果将保存在当前目录的 yoloworld_result.jpg 中,如图所示。
终端打印如下
(test3) bianbu@bianbu:~$ ros2 launch br_perception yoloworld_infer_img.launch.py img_path:='./test2.jpg' class_names:="[fan, box]"
[INFO] [launch]: All log files can be found below /home/bianbu/.ros/log/2025-08-13-16-09-04-608187-bianbu-217760
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [yoloworld_img_node-1]: process started with pid [217761]
[yoloworld_img_node-1] /home/bianbu/test3/lib/python3.12/site-packages/clip/clip.py:6: UserWarning: pkg_resources is deprecated as an API. See https://setuptools.pypa.io/en/latest/pkg_resources.html. The pkg_resources package is slated for removal as early as 2025-11-30. Refrain from using this package or pin to Setuptools<81.
[yoloworld_img_node-1] from pkg_resources import packaging
[yoloworld_img_node-1] All model files already exist and do not need to be downloaded
[yoloworld_img_node-1] conf_threshold: 0.2, iou_threshold: 0.45, class_names: ['fan', 'box']
[yoloworld_img_node-1] Init Model ..................
[yoloworld_img_node-1] all time cost:0.697995662689209
[yoloworld_img_node-1] x_min:980, y_min:469, width:466, height:424, label:box, confidence:0.72
[yoloworld_img_node-1] x_min:417, y_min:510, width:294, height:493, label:fan, confidence:0.29
[yoloworld_img_node-1] The object detection results are saved in: det_result.jpg
[INFO] [yoloworld_img_node-1]: process has finished cleanly [pid 217761]
Web 可视化推理结果
启动推理发布节点(终端 1):
ros2 launch br_perception yoloworld_infer_img.launch.py \
publish_result_img:=true \
img_path:='./test2.jpg' \
class_names:="[fan, box]"
启动 Web 可视化服务(终端 2):
ros2 launch br_visualization websocket_cpp.launch.py image_topic:='/result_img'
终端提示访问地址:
...
Please visit in your browser: http://<IP>:8080
...
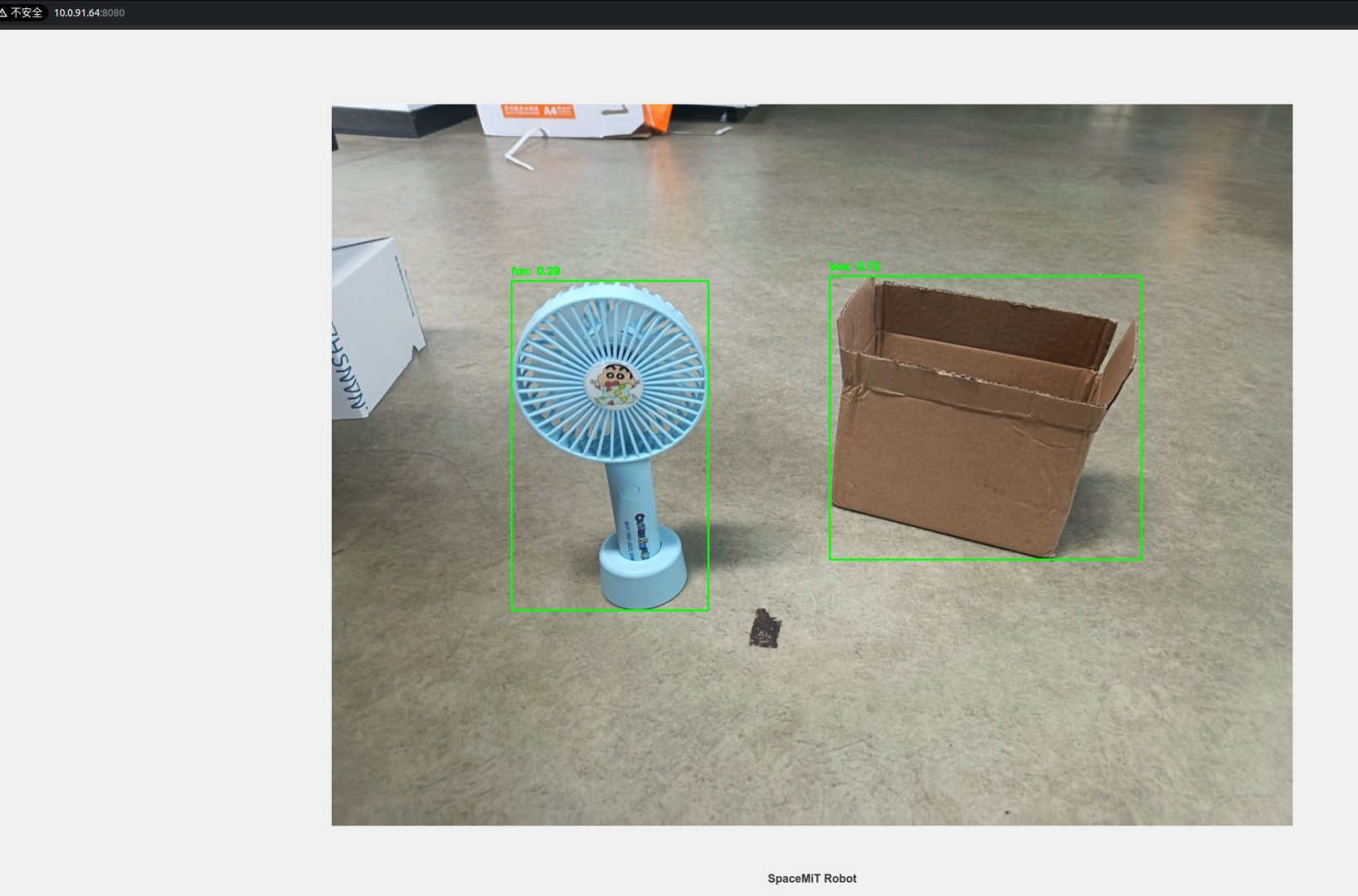
打开浏览器输入 http://<IP>:8080,即可查看实时推理图像结果。
结果订阅
输入 ros2 topic echo /inference_result 查看推理结果话题
使用以下代码实现简单的话题订阅
from rclpy.node import Node
from std_msgs.msg import Header
from jobot_interfaces.msg import DetectionResultArray, DetectionResult
import rclpy
class DetectionSubscriber(Node):
def __init__(self):
super().__init__('detection_sub')
self.subscription = self.create_subscription(
DetectionResultArray,
'/inference_result',
self.listener_callback,
10)
def listener_callback(self, msg: DetectionResultArray):
self.get_logger().info(f"Frame: {msg.header.frame_id}")
for det in msg.results:
self.get_logger().info(
f"[{det.label}] ({det.x_min},{det.y_min}) "
f"{det.width}x{det.height} conf={det.conf:.2f}"
)
def main(args=None):
rclpy.init(args=args)
node = DetectionSubscriber()
rclpy.spin(node)
node.destroy_node()
rclpy.shutdown()
main()
参数说明
yoloworld_infer_img.launch.py 的参数说明
| 参数名称 | 作用 | 默认值 |
|---|---|---|
| img_path | 推理时使用的图片路径 | data/detection/test.jpg |
| publish_result_img | 是否以图像消息的形式发布推理结果 | false |
| result_img_topic | 发布的渲染图像消息名,publish_result_img为true时才有效 | /result_img |
| result_topic | 发布的推理结果消息名 | /inference_result |
| conf_threshold | 控制检测结果可信度的最低标准(过滤低分框) | 0.2 |
| iou_threshold | 控制去重规则的严格程度(处理重叠框) | 0.45 |
| class_names | 控制检测目标的范围(可以是常规类别,也可以是自然语言描述) | "[people]" |
视频流推理
启动相机(USB 示例)
ros2 launch br_sensors usb_cam.launch.py video_device:="/dev/video20"
启动推理并发布结果
启动推��理(终端 1):
ros2 launch br_perception yoloworld_infer_video.launch.py \
sub_image_topic:='/image_raw' \
publish_result_img:=true \
result_topic:='/inference_result' \
class_names:="[box]"
Web 显示(终端 2):
ros2 launch br_visualization websocket_cpp.launch.py image_topic:='/result_img'
终端提示访问地址:
...
Please visit in your browser: http://<IP>:8080
...
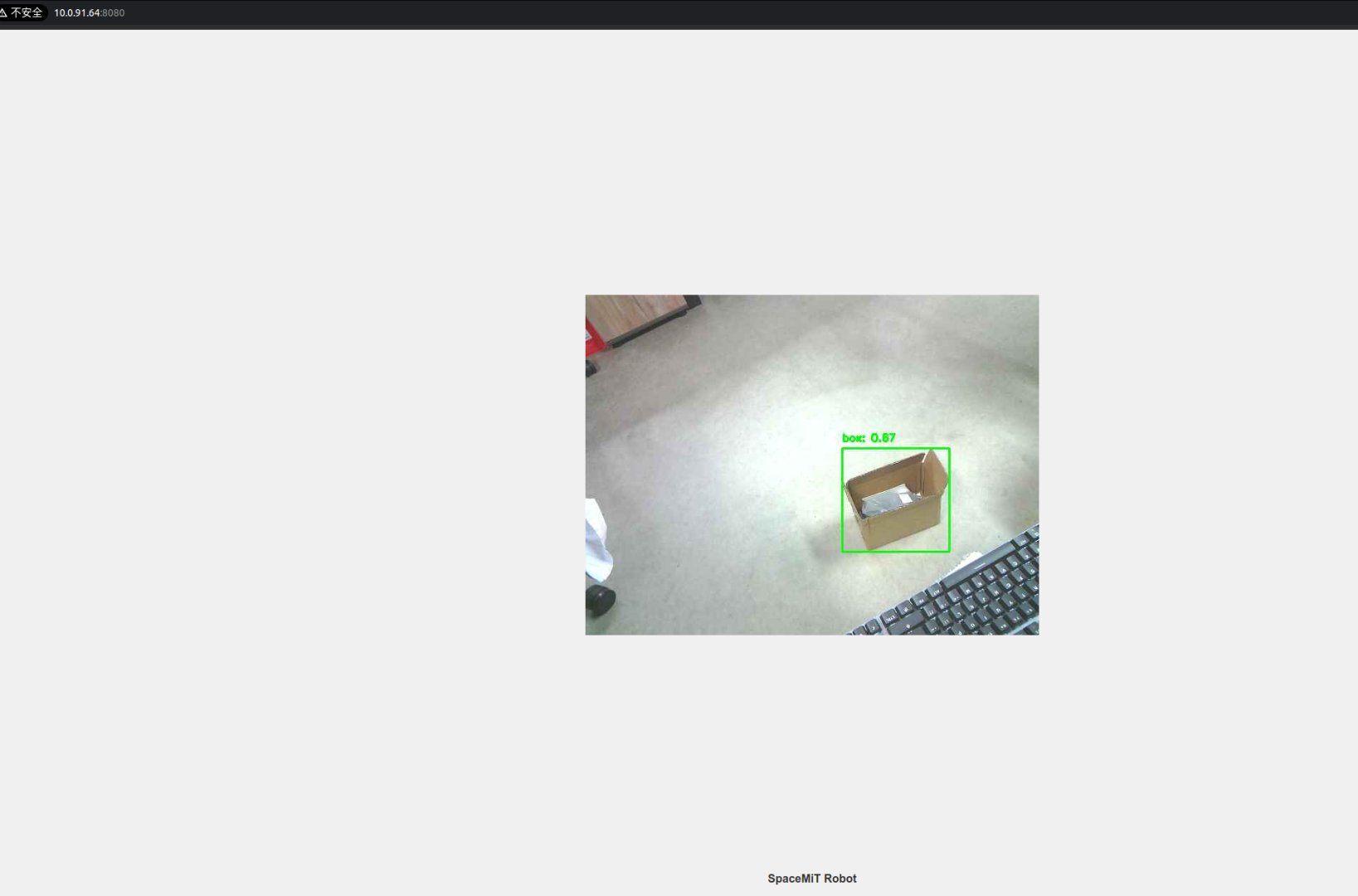
打开浏览器输入 http://<IP>:8080,即可查看实时推理图像结果。
无可视化(仅数据输出)
如果你只想要拿到模型推理的结果,运行下述命令:
ros2 launch br_perception yoloworld_infer_video.launch.py \
sub_image_topic:='/image_raw' \
publish_result_img:=false \
result_topic:='/inference_result' \
class_names:="[box]"
结果订阅
输入 ros2 topic echo /inference_result 查看推理结果话题
使用以下代码实现简单的话题订阅
from rclpy.node import Node
from std_msgs.msg import Header
from jobot_interfaces.msg import DetectionResultArray, DetectionResult
import rclpy
class DetectionSubscriber(Node):
def __init__(self):
super().__init__('detection_sub')
self.subscription = self.create_subscription(
DetectionResultArray,
'/inference_result',
self.listener_callback,
10)
def listener_callback(self, msg: DetectionResultArray):
self.get_logger().info(f"Frame: {msg.header.frame_id}")
for det in msg.results:
self.get_logger().info(
f"[{det.label}] ({det.x_min},{det.y_min}) "
f"{det.width}x{det.height} conf={det.conf:.2f}"
)
def main(args=None):
rclpy.init(args=args)
node = DetectionSubscriber()
rclpy.spin(node)
node.destroy_node()
rclpy.shutdown()
main()
参数说明
yoloworld_infer_video.launch.py 的参数说明
| 参数名称 | 作用 | 默认值 |
|---|---|---|
| sub_image_topic | 订阅的图像消息话题名 | /image_raw |
| publish_result_img | 是否以图像消息的形式发布推理结果 | false |
| result_img_topic | 发布的渲染图像消息名,publish_result_img为true时才有效 | /result_img |
| result_topic | 发布的推理结果消息名 | /inference_result |
| conf_threshold | 控制检测结果可信度的最低标准(过滤低分框) | 0.2 |
| iou_threshold | 控制去重规则的严格程度(处理重叠框) | 0.45 |
| class_names | 控制检测目标的范围(可以是常规类别,也可以是自然语言描述) | "[people]" |