5.3.2 Object Detection
YOLO 模型简介
本示例展示如何基于 SpaceMiT 智算核,使用图片或视频流作为输入,执行 YOLO 系列目标检测模型的推理,并通过 ROS 2 发布检测结果(包括目标类别与边界框坐标)。
支持模型版本
- YOLOv5
- YOLOv6
- YOLOv8
- YOLOv11 等
ONNX 格式模型可通过 ⭐ Bianbu AI Demo Zoo 下载获取,所有模型基于 COCO 数据集 训练,支持 80 类常见目标,如人物、动物、水果、交通工具等。
应用优势
- 推理速度快
- 精度高,泛化能力强
- 部署简单,资源占用低
应用场景
- 自动驾驶:行人和车辆识别
- 智能家居:垃圾分类、监控识别
- 智慧安防:异常行为检测、跌倒识别
环境准备
安装依赖
sudo apt install python3-opencv ros-humble-cv-bridge ros-humble-camera-info-manager \
ros-humble-image-transport python3-spacemit-ort
导入 ROS2 环境
source /opt/bros/humble/setup.bash
模型配置查看
可执行以下命令,查看当前系统中已支持的模型配置:
ros2 launch br_perception infer_info.launch.py | grep 'detection'
示例输出:
- config/detection/yolov8.yaml
- config/detection/yolov6.yaml
- config/detection/yolov11_640.yaml
- config/detection/yolov5.yaml
- config/detection/yolov11_320.yaml
后续推理时,将 config_path 设置为相应的 .yaml 文件路径,即可使用对应 YOLO 模型。
图片推理
准备图片
cp /opt/bros/humble/share/jobot_infer_py/data/detection/test.jpg .
本地保存推理结果
ros2 launch br_perception infer_img.launch.py \
config_path:='config/detection/yolov6.yaml' \
img_path:='./test.jpg'
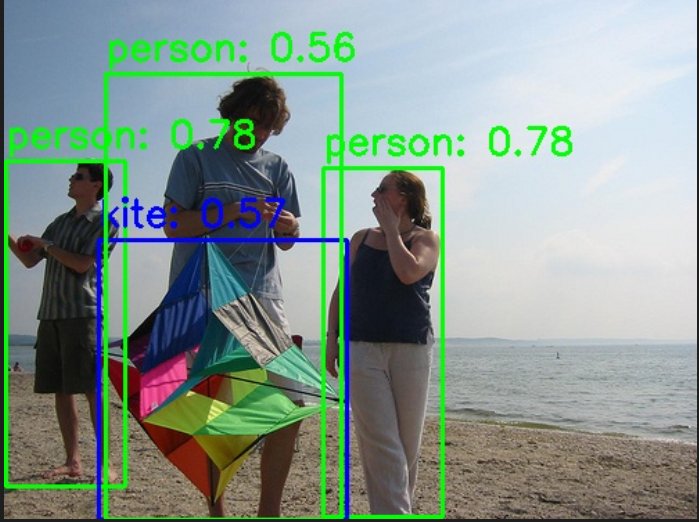
输出结果将保存在当前目录的 det_result.jpg 中,如图所示。
Web 可视化推理结果
启动推理发布节点(终端 1):
ros2 launch br_perception infer_img.launch.py \
config_path:='config/detection/yolov6.yaml' \
img_path:='./test.jpg' \
publish_result_img:=true \
result_img_topic:='result_img' \
result_topic:='/inference_result'
启动 Web 可视化服务(终端 2):
ros2 launch br_visualization websocket_cpp.launch.py image_topic:='/result_img'
终端提示访问地址:
...
Please visit in your browser: http://<IP>:8080
...
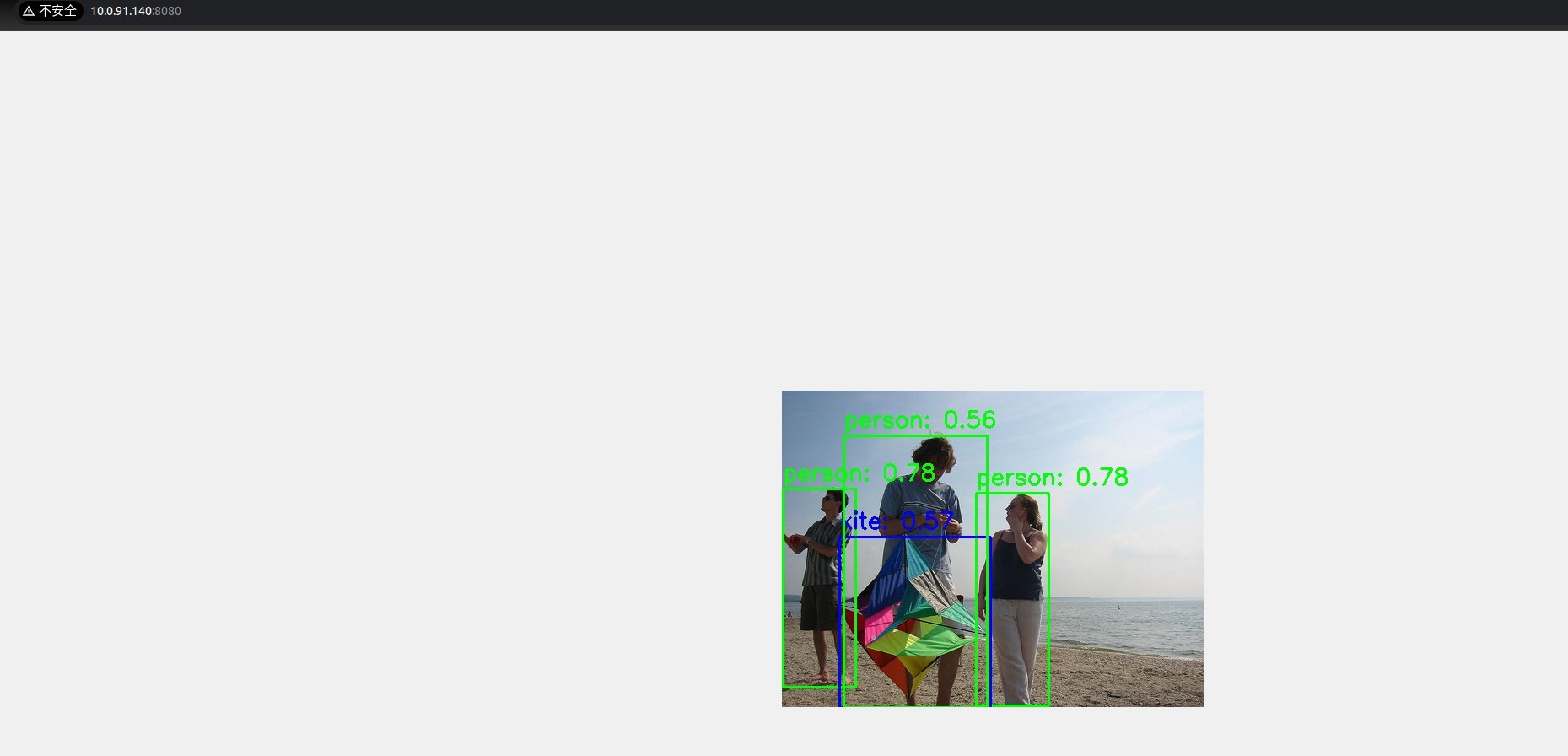
打开浏览器输入 http://<IP>:8080,即可查看实时推理图像结果。
消息订阅和查看
参考 《消息订阅和查看》章节过程打印消息数据、查看消息格式、并通过 python 订阅推理结果。
视频流推理
启动相机(USB 示例)
ros2 launch br_sensors usb_cam.launch.py video_device:="/dev/video20"
启动推理并发布结果
启动推理(终端 1):
ros2 launch br_perception infer_video.launch.py \
config_path:='config/detection/yolov6.yaml' \
sub_image_topic:='/image_raw' \
publish_result_img:=true \
result_topic:='/inference_result'
Web 显示(终端 2):
ros2 launch br_visualization websocket_cpp.launch.py image_topic:='/result_img'
终端提示访问地址:
...
Please visit in your browser: http://<IP>:8080
...
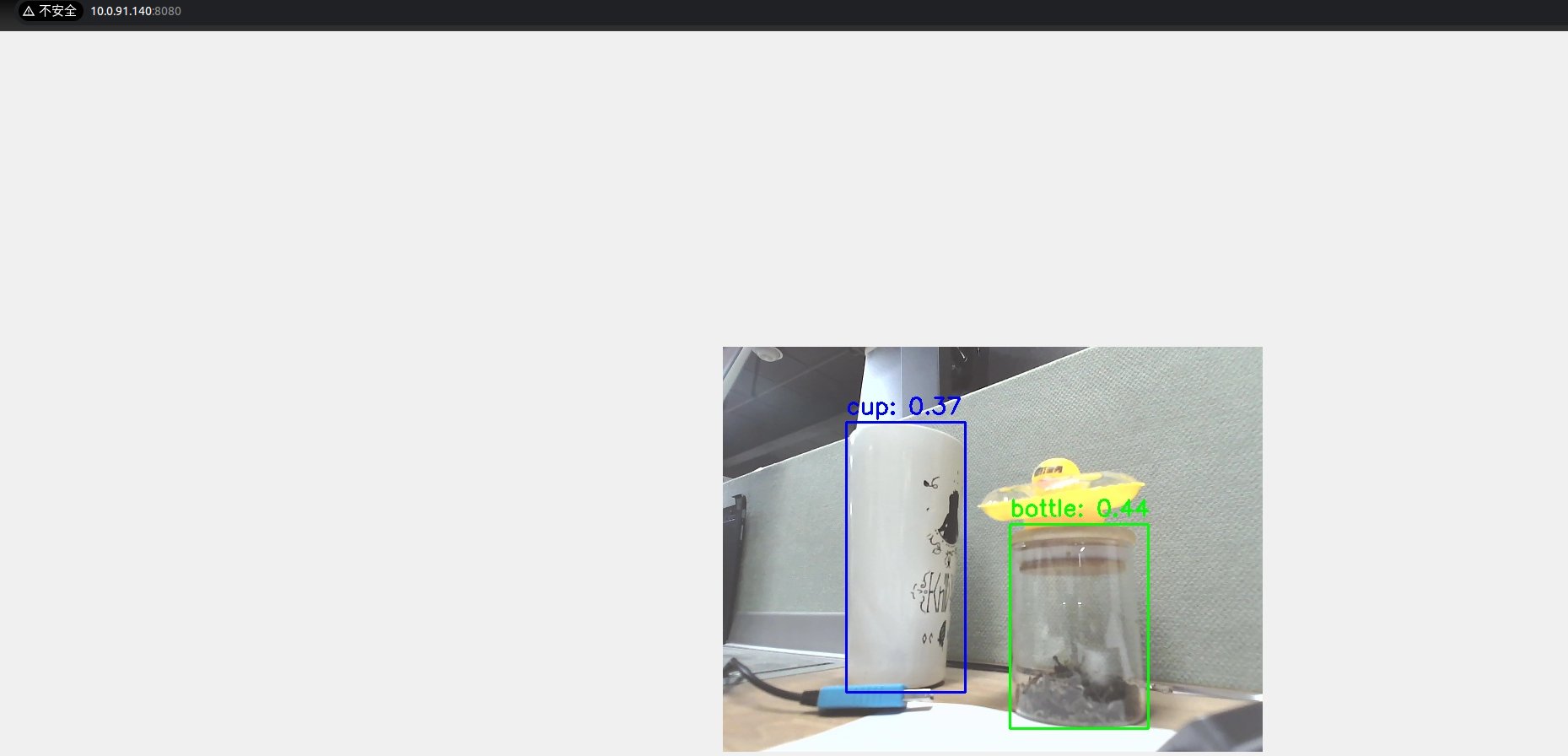
打开浏览器输入 http://<IP>:8080,即可查看实时推理图像结果。
无可视化(仅数据输出)
如果你只想要拿到模型推理的结果,运行下述命令:
ros2 launch br_perception infer_video.launch.py \
config_path:='config/detection/yolov6.yaml' \
sub_image_topic:='/image_raw' \
publish_result_img:=false \
result_topic:='/inference_result'
通过 ros2 topic echo /inference_result 话题获取数据。
消息订阅和查看
参考 《消息订阅和查看》章节过程打印消息数据、查看消息格式、并通过 python 订阅推理结果。
参数说明
图片推理和视频流推理的参数说明请参考 《参数说明》。