5.4.9 声源定位
硬件介绍
官方链接:链接
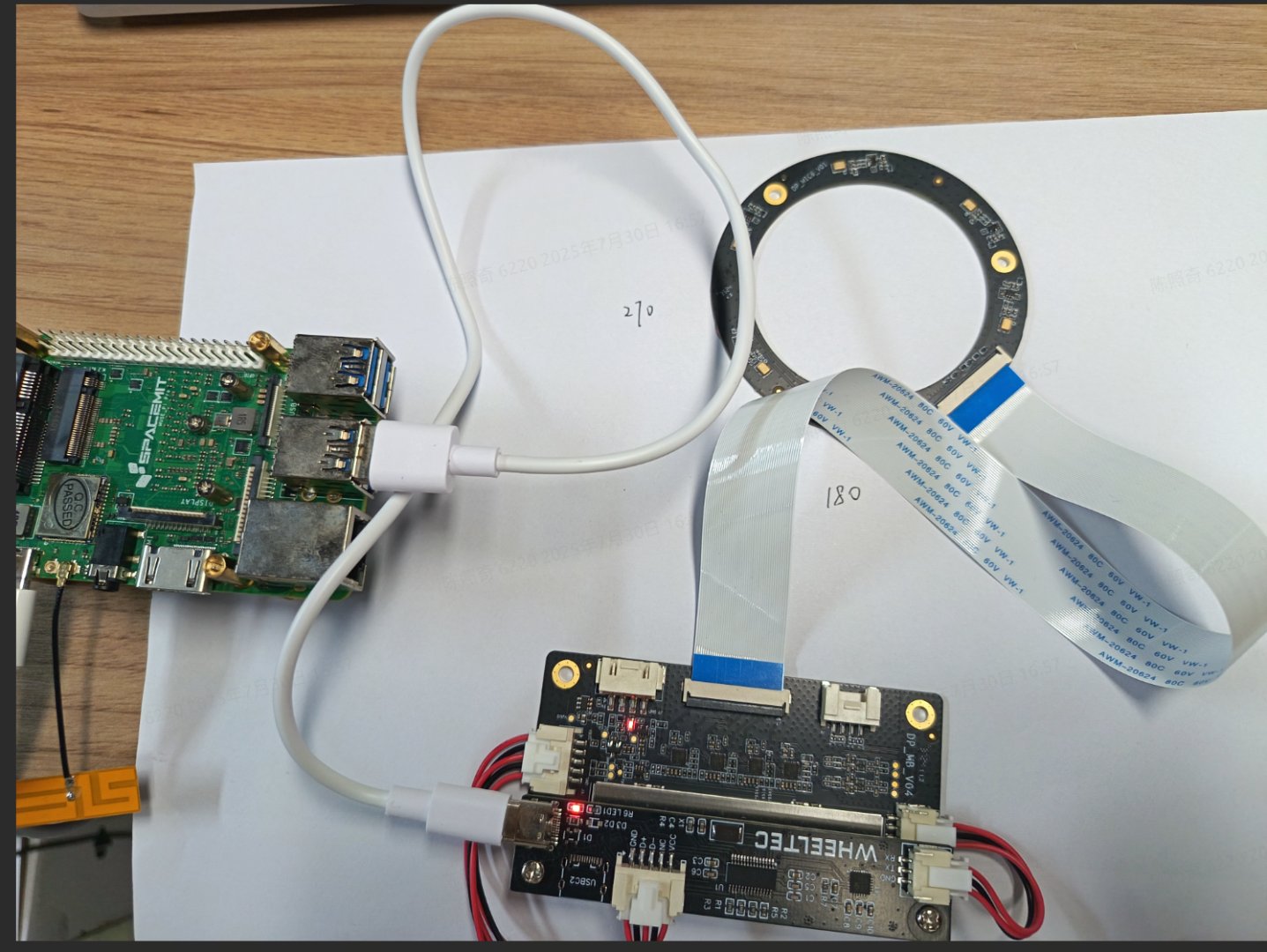
本示例使用科大讯飞联名远场麦克风阵列六麦M260C板语音交互模块实现声源定位功能,硬件如下图:

输出的角度为 0 ~ 360
硬件连接
设置设备规则
sudo su
echo 'KERNEL=="ttyACM*", ATTRS{serial}=="0004", ATTRS{idVendor}=="1a86", ATTRS{idProduct}=="55d4", MODE:="0777",SYMLINK+="wheeltec_mic"' >/etc/udev/rules.d/wheeltec_mic.rules
udevadm control --reload-rules
udevadm trigger
输入 ls /dev/wheeltec_mic -lh 查看是否成功设置

输出如上表示设置成功。
启动声源定位
ros2 launch br_sensors ring_mic.launch.py
在任意方向说:“小微小微”,节点检测到唤醒词后会输出声源角度,如下图所示:
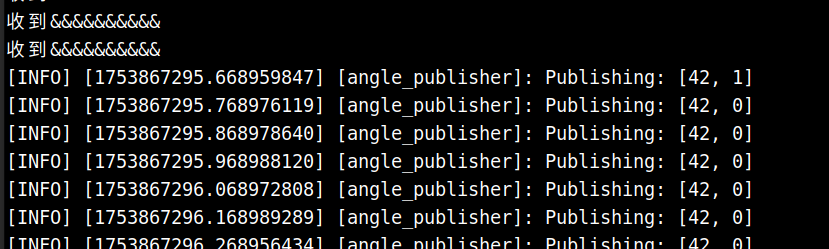
“小微小微” 为默认唤醒词,可以根据官方硬件文档按需求更改。
收到唤醒词后,标志位会置为 1 一次,随后置为 0 ,在订阅话题时,可以根据该标志位判断有无唤醒。
话题订阅
话题名为: angle_topic
简单的订阅脚本:
import rclpy
from rclpy.node import Node
from std_msgs.msg import Int32MultiArray
class AngleSubscriber(Node):
def __init__(self):
super().__init__('angle_subscriber')
self.subscription = self.create_subscription(
Int32MultiArray,
'angle_topic',
self.listener_callback,
10
)
def listener_callback(self, msg):
if msg.data and len(msg.data) >= 2:
angle = msg.data[0]
trigger_flag = msg.data[1]
self.get_logger().info(f"Received angle: {angle}, trigger: {trigger_flag}")
def main(args=None):
rclpy.init(args=args)
node = AngleSubscriber()
rclpy.spin(node)
node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
保存为 angle_sub.py
source /opt/bros/humble/setup.bash
python3 angle_sub.py
即可看到消息的订阅和循环打印