6.4.9 Sound Localization
Last Version: 12/09/2025
This guide demonstrates how to implement sound source localization using the iFlytek M260C 6-Microphone Array Board. The hardware detects the direction of sound sources and outputs an angle between 0° and 360°.
Hardware Specifications
Product: iFlytek Co-branded Far-field Microphone Array (6-Mic)
Model: M260C Voice Interaction Module
Official Link: Product Page

It outputs an angle between 0° and 360°.
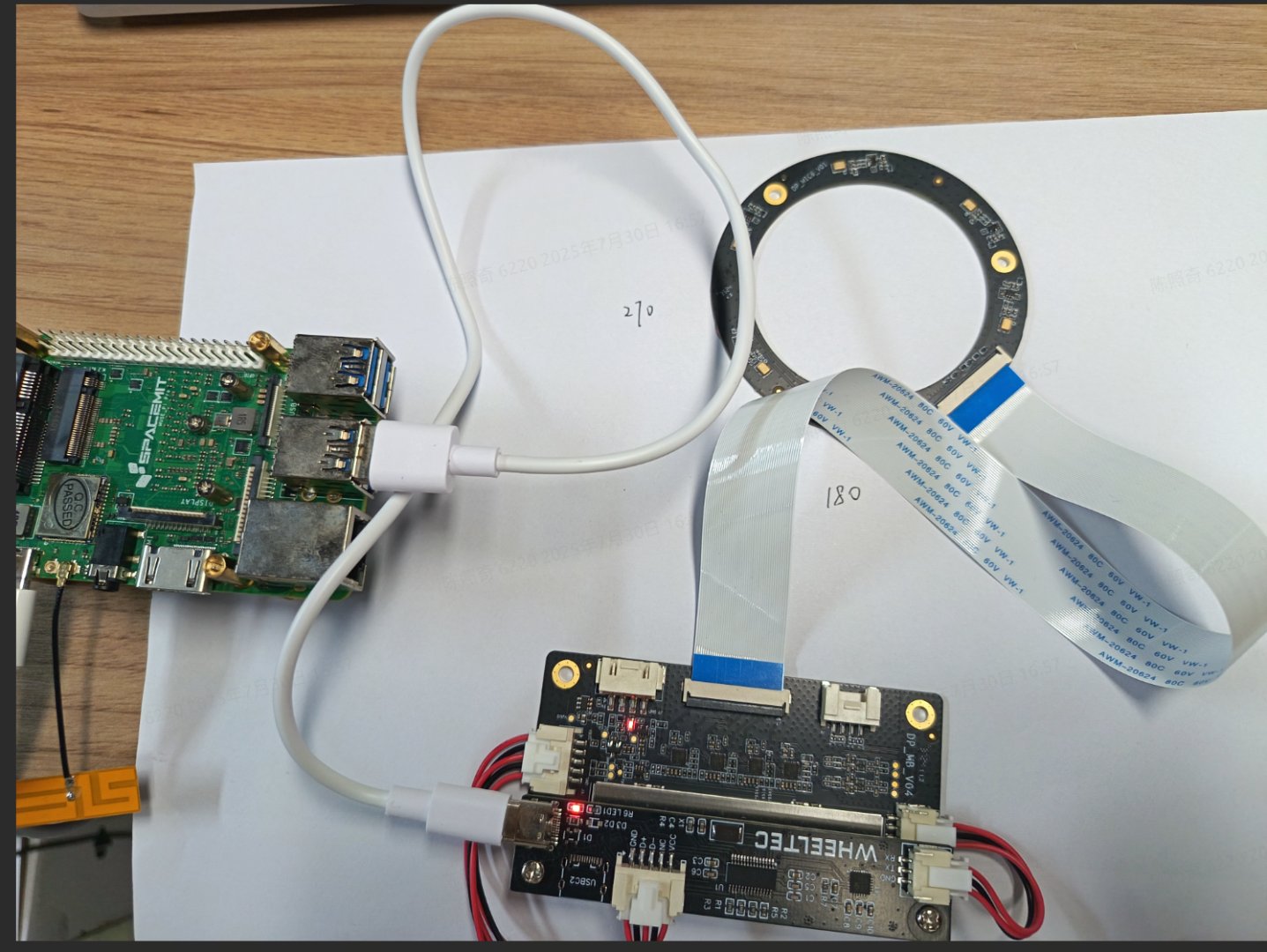
Hardware Connection
Connect the microphone array to your system as shown below:
Device Configuration
To allow your system to recognize the microphone array, you need to create a device rule
sudo su
echo 'KERNEL=="ttyACM*", ATTRS{serial}=="0004", ATTRS{idVendor}=="1a86", ATTRS{idProduct}=="55d4", MODE:="0777",SYMLINK+="wheeltec_mic"' >/etc/udev/rules.d/wheeltec_mic.rules
udevadm control --reload-rules
udevadm trigger
Verify the configuration:
ls /dev/wheeltec_mic -lh
Expected successful output:

Launching Sound Localization
Start the microphone node:
ros2 launch br_sensors ring_mic.launch.py
Testing the Functionality
- Speak the default wake-up phrase "小微小微" / "Xiao Wei Xiao Wei" (in any direction).
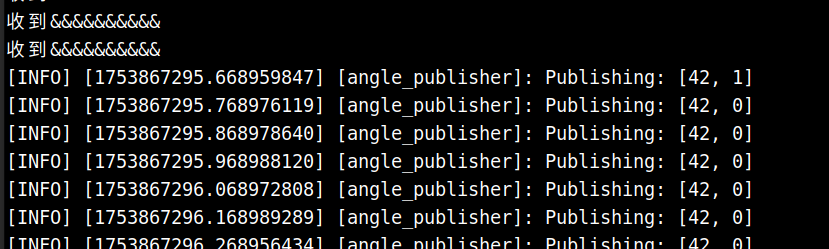
- The system detects the wake-up phrase and outputs the angle of the sound source (0° to 360°)
Example terminal output:
Note:
- The default wake-up phrase is "Xiao Wei Xiao Wei". You can change it by referring to the official hardware documentation.
- A trigger flag is set to
1when wake word is detected, then resets to0 - Use this flag to determine wake phrase detection in your subscribers
Topic Subscription
Topic name: angle_topic
Below is a simple Python script to subscribe to the angle_topic and display the angle and wake-up flag:
import rclpy
from rclpy.node import Node
from std_msgs.msg import Int32MultiArray
class AngleSubscriber(Node):
def __init__(self):
super().__init__('angle_subscriber')
self.subscription = self.create_subscription(
Int32MultiArray,
'angle_topic',
self.listener_callback,
10
)
def listener_callback(self, msg):
if msg.data and len(msg.data) >= 2:
angle = msg.data[0]
trigger_flag = msg.data[1]
self.get_logger().info(f"Received angle: {angle}, trigger: {trigger_flag}")
def main(args=None):
rclpy.init(args=args)
node = AngleSubscriber()
rclpy.spin(node)
node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
Save the script as angle_sub.py
Source your ROS 2 environment and run the script:
source /opt/bros/humble/setup.bash
python3 angle_sub.py
The subscriber will continuously print received angle and trigger data whenever the wake-up phrase is detected.