6.4.5 Navigation2
Last Version: 12/09/2025
Overview
Navigation2 is the ROS 2–based navigation framework that safely drives a mobile robot from point A to point B.
It integrates multiple modules, including pose estimation, behavior planning, path planning, and obstacle avoidance.
GitHub: ros-navigation/navigation2
This example demonstrates Navigation2 in two scenarios:
- simulation (Gazebo + rviz on the PC)
- real-vehicle (physical robot with SpaceMiT board)
Simulation Navigation
In this section, a simulated robot-car model is used to demonstrate Navigation2 navigation. The simulation lets you observe the robot moving in Gazebo and visualizing navigation in rviz.
- Navigation2 algorithms run on the SpacemiT RISC-V board.
- The simulated robot model, Gazebo environment, and rviz visualization run on a PC connected to the same network.
Preparation
- Flash the SpacemiT board with the Bianbu ROS system image.
- Install ROS 2 Humble and Bianbu Robot SDK on the PC.
Usage Guide
Launch the Simulation Environment
On the PC, open a terminal and install the robot-car model and Gazebo environment:
sudo apt install ros-humble-gazebo*
sudo apt install ros-humble-turtlebot3
sudo apt install ros-humble-turtlebot3-gazebo
sudo apt install ros-humble-turtlebot3-bringup
sudo apt install ros-humble-turtlebot3-simulations
After installation is complete, run the following command to load the robot model and start the Gazebo simulation environment:
source /opt/ros/humble/setup.bash
source /usr/share/gazebo/setup.sh
export TURTLEBOT3_MODEL=burger
ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py
Once launched successfully, the simulation environment will appear as shown below:

Start Navigation2
Next, start Navigation2 on the SpacemiT board to enable autonomous robot navigation.
Open a terminal on on the SpacemiT board, then run the following command to install Navigation2:
sudo apt install ros-humble-navigation2
sudo apt install ros-humble-nav2-bringup
After installation is complete, start Navigation2 by running:
source /opt/bros/humble/setup.bash
ros2 launch nav2_bringup bringup_launch.py use_sim_time:=True map:=/opt/ros/humble/share/nav2_bringup/maps/turtlebot3_world.yaml
Visualization on PC
On the PC, open a new terminal and start rviz visualization with:
source /opt/ros/humble/setup.bash
source ~/ros2_demo_ws/install/setup.bash
ros2 launch br_visualization display_navigation.launch.py
rviz2
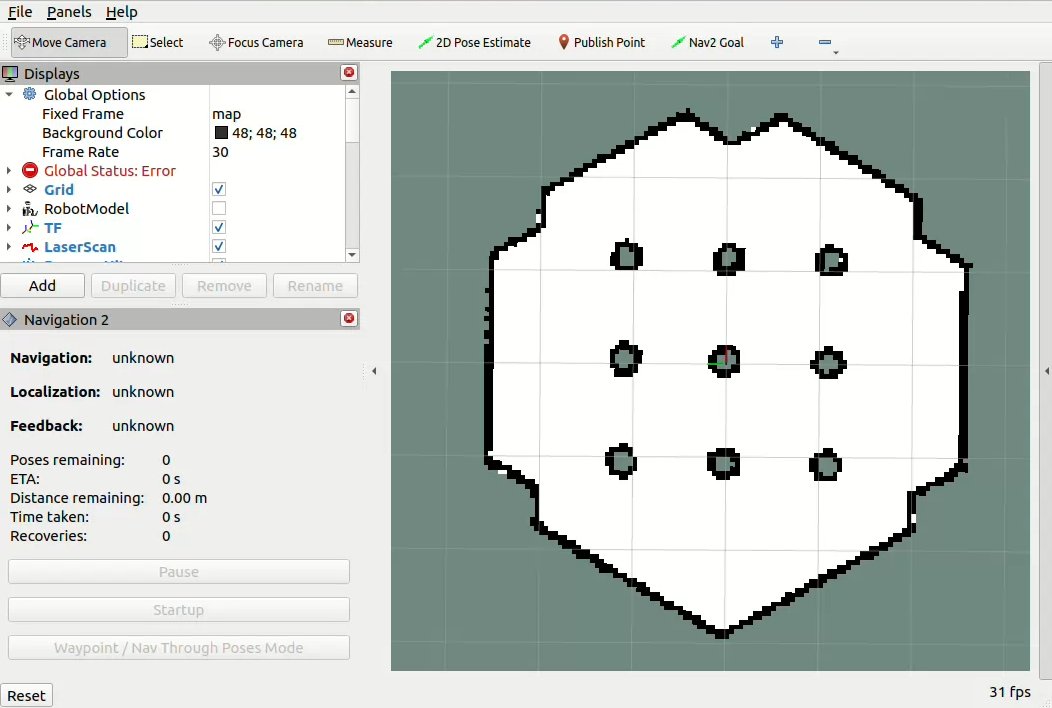
Initially, you will only see an empty environment map, because the robot’s initial pose has not been set.
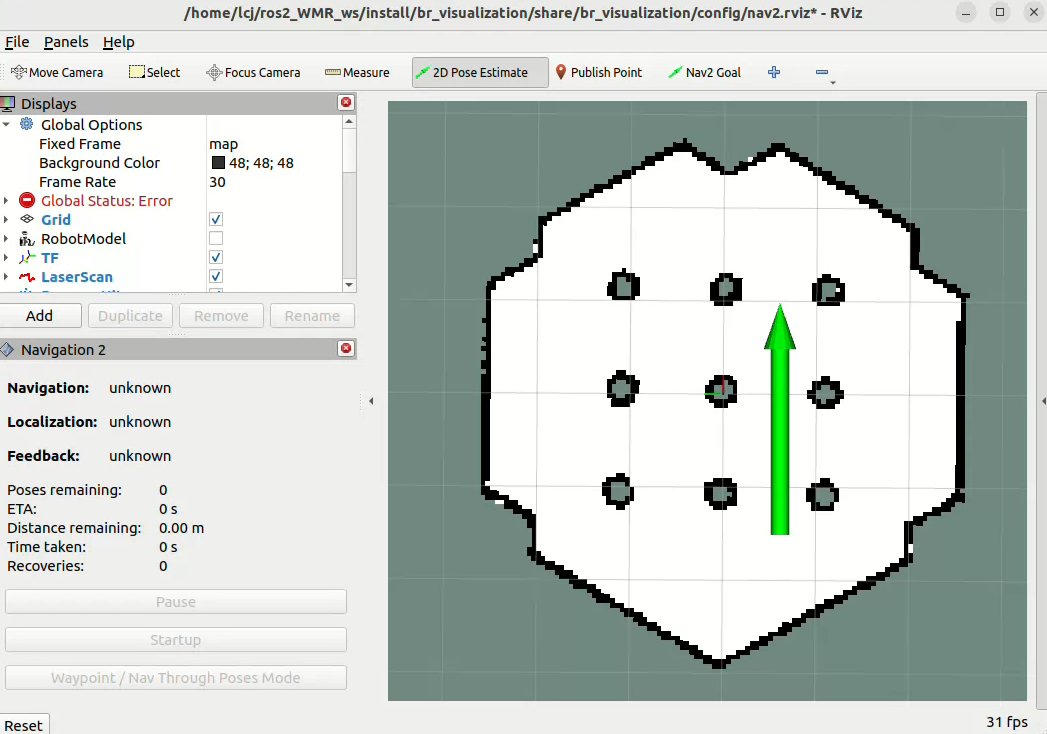
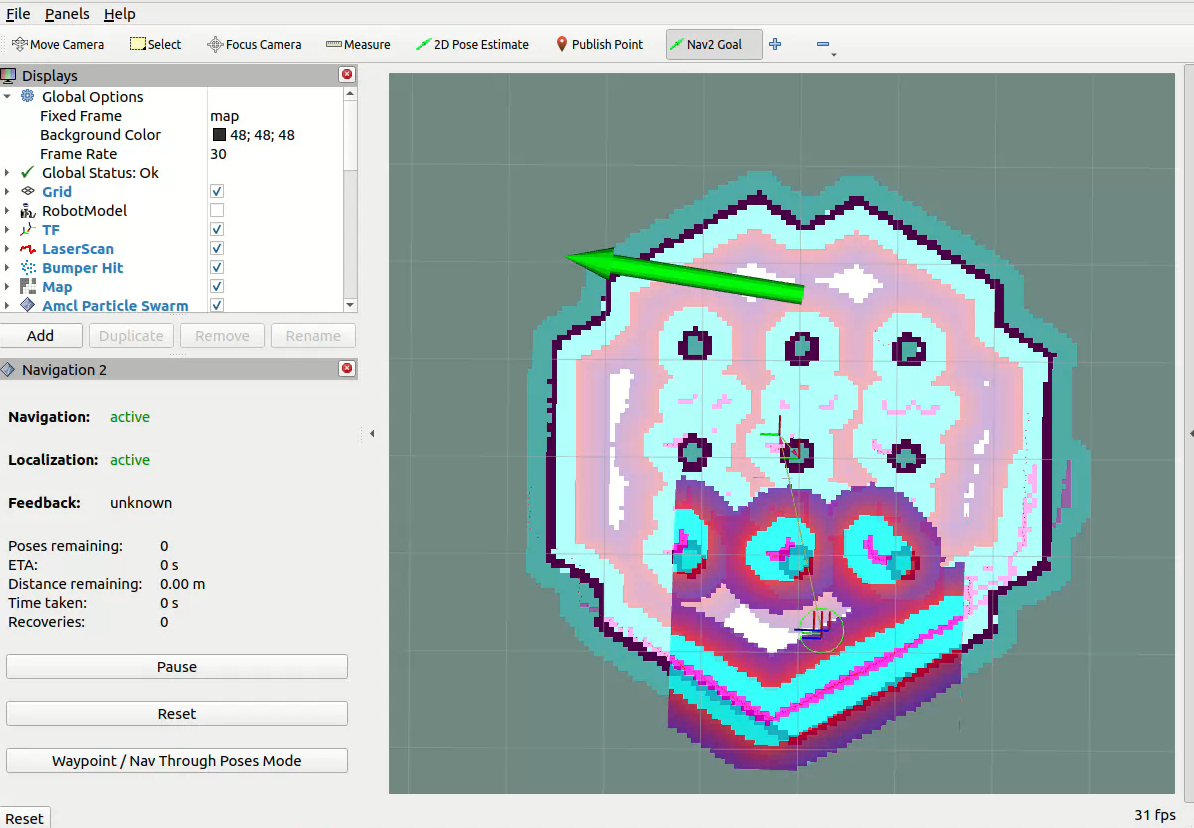
In rviz2, click 2D Pose Estimate to set the robot’s starting position and orientation:
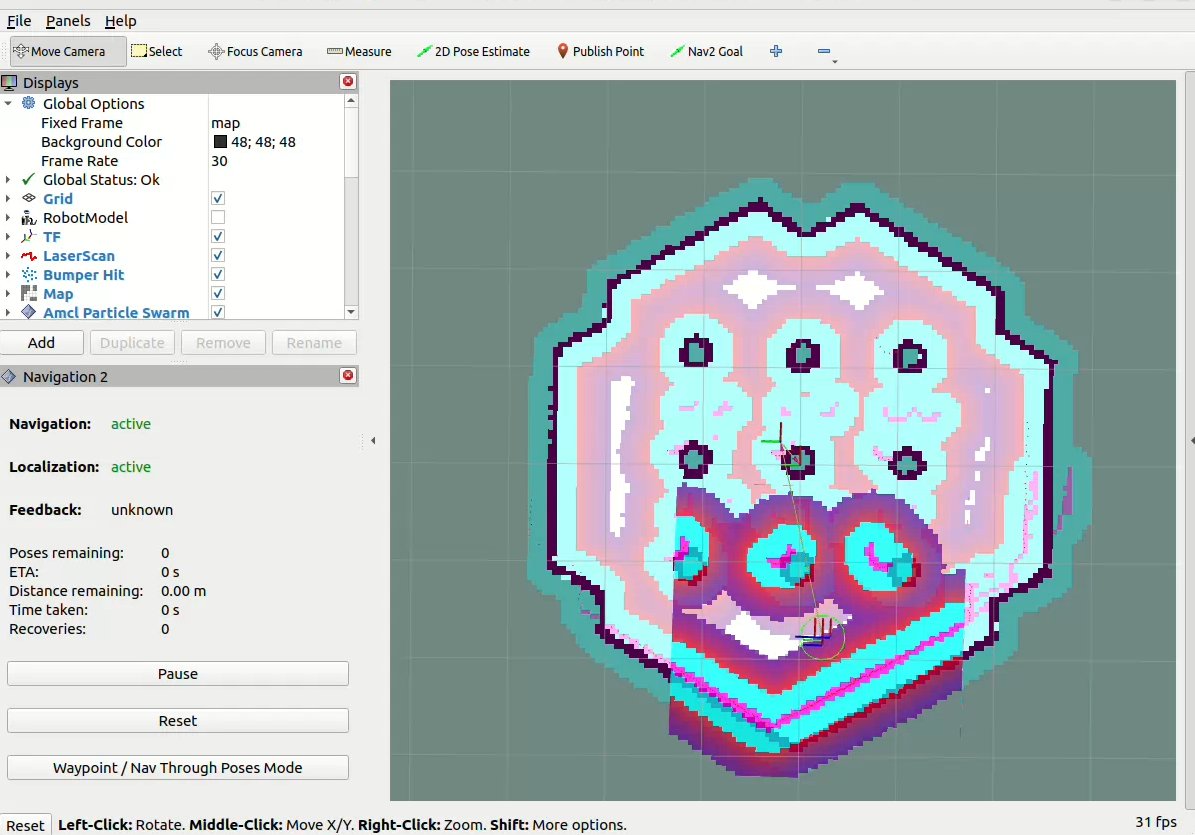
Once set, rviz will load the robot’s coordinate frames and costmap information:
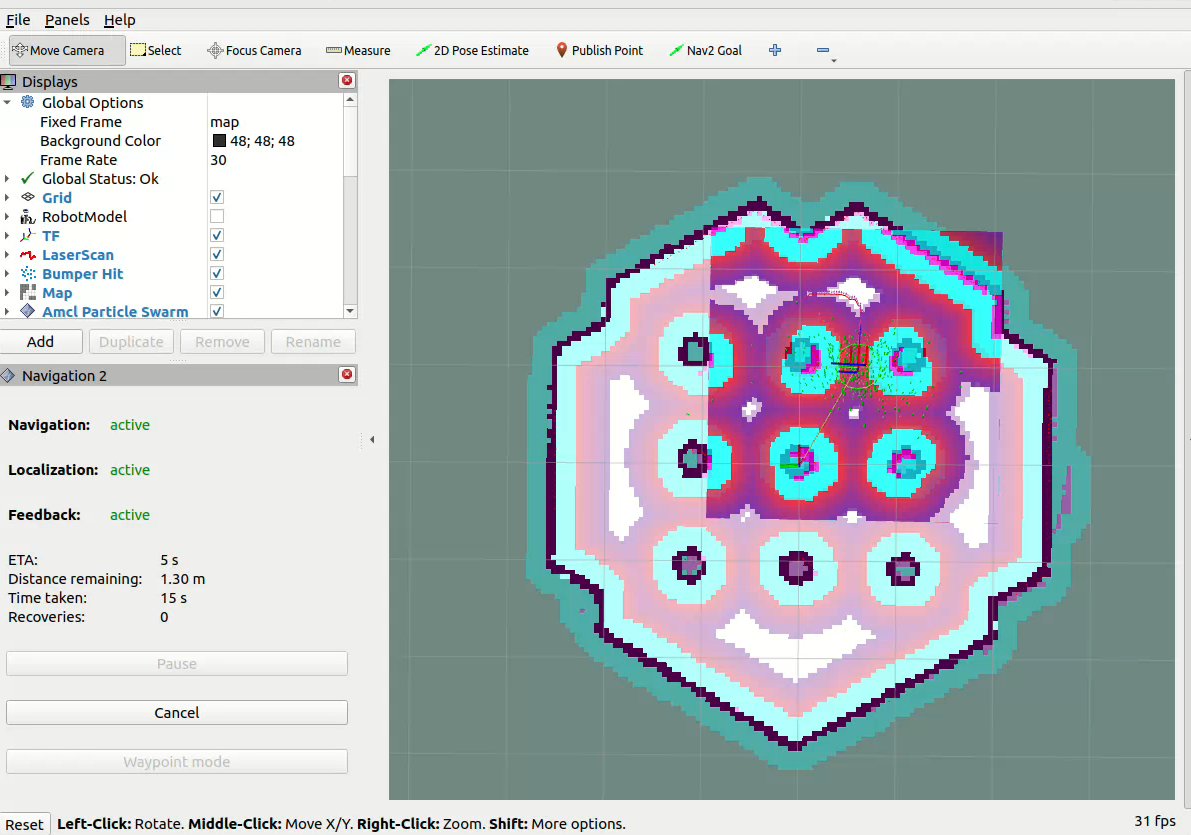
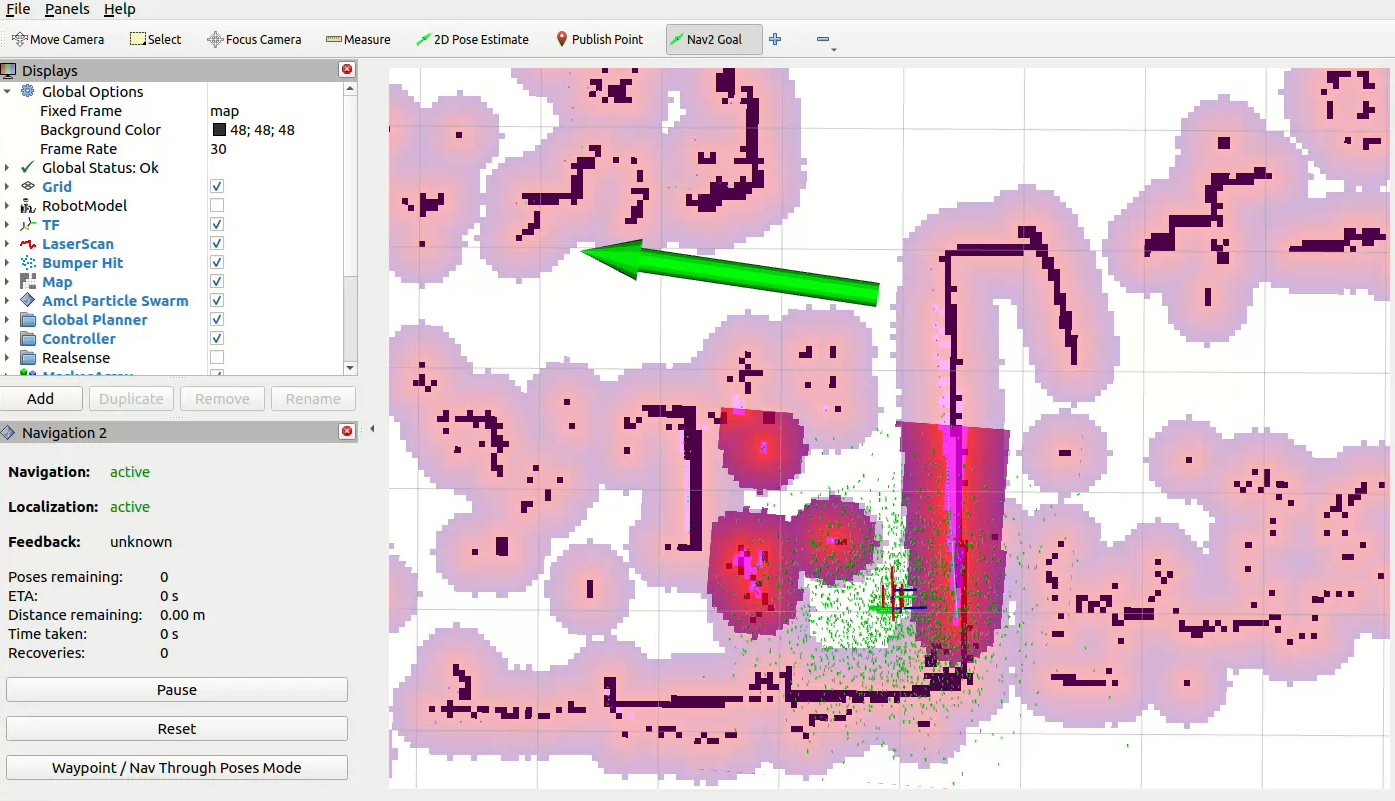
To Click 2D Nav Goal in rviz to set the navigation target:
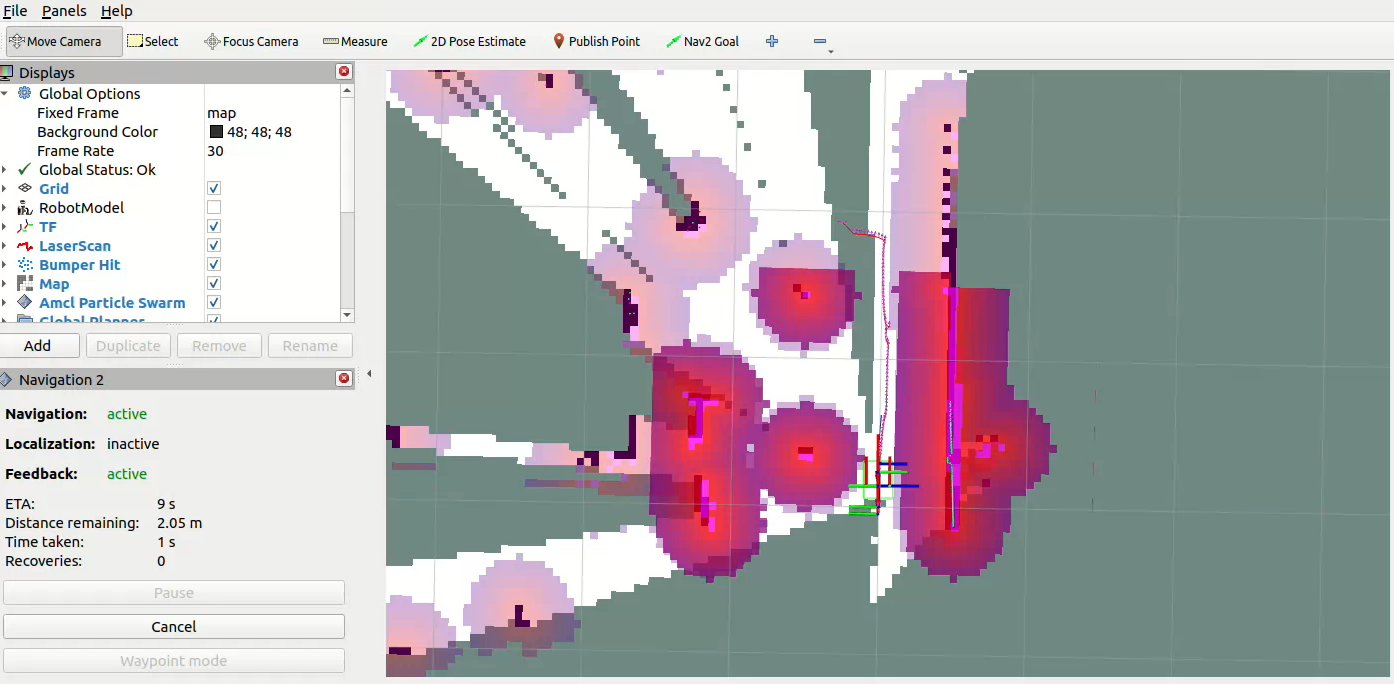
You can then observe the robot navigating to the target:
Real-Vehicle Navigation
This section assumes you have already built and saved an environment map using SLAM.
We will now start Navigation2 on an actual robot equipped with a SpacemiT RISC-V board and visualize the process on the PC.
Preparation
- Flash the SpacemiT board with Bianbu Desktop 24.04 and install the Bianbu Robot SDK.
- Install ros-humble and the Bianbu Robot SDK on the PC.
- Build and save the environment map as described in SLAM.
Usage Guide
Install Navigation2
Run the following commands on the SpacemiT board terminal to install Navigation2:
sudo apt install ros-humble-navigation2
sudo apt install ros-humble-nav2-bringup
Start Navigation2 Navigation
Launch the real-robot configuration and the Navigation2 stack in one step by running:
source /opt/bros/humble/setup.bash
ros2 launch br_navigation nav2.launch.py
Visualization on PC
Open a new terminal on the PC and start RViz for visualization:
ros2 launch br_visualization display_navigation.launch.py
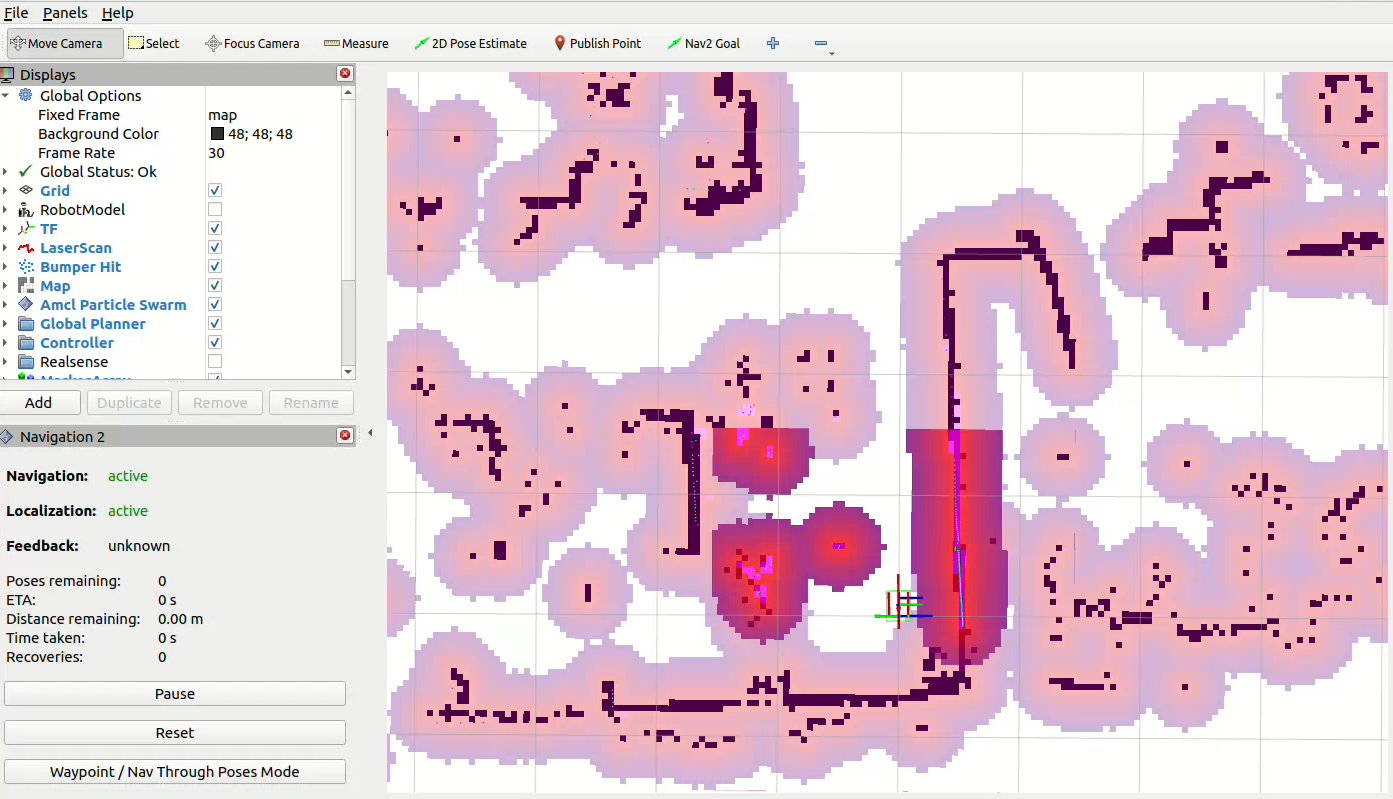
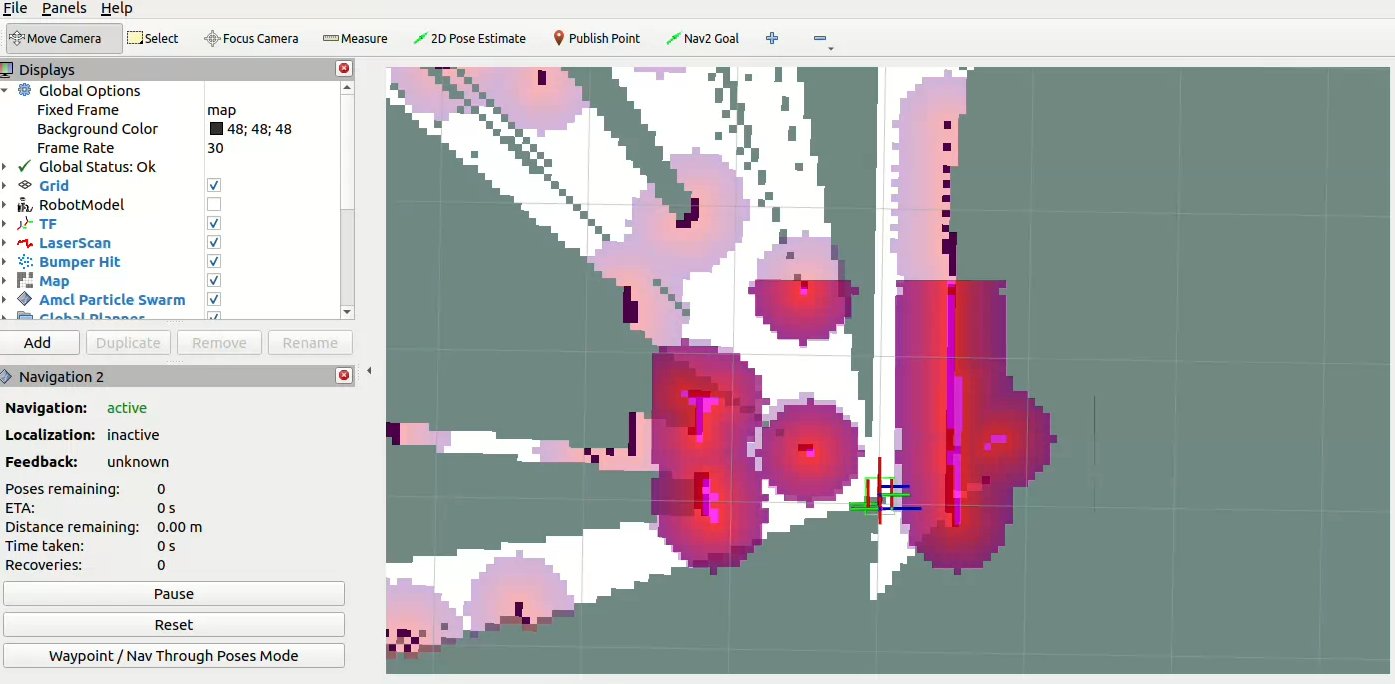
The launch file is preconfigured to set the robot’s initial pose at the SLAM map origin. If needed, you can adjust the robot’s position and orientation in RViz by clicking 2D Pose Estimate:
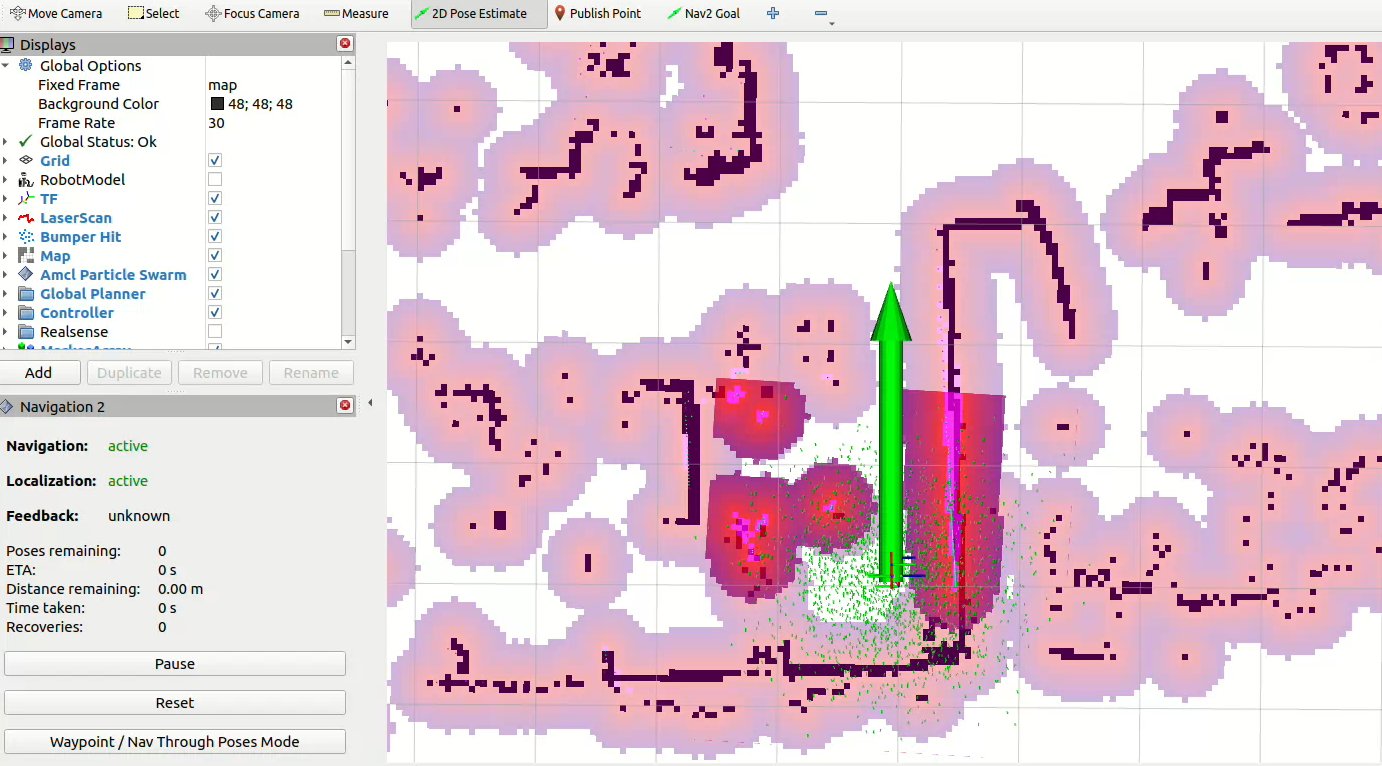
Click 2D Nav Goal to specify a navigation target and monitor the progress in rviz2 on the PC.
Run SLAM and Navigation2 Together
If you don’t already have a prebuilt map, you can run SLAM and Navigation2 simultaneously to perform navigation while the map is being generated and updated in real time.
Run below command on the SpacemiT board:
ros2 launch br_navigation nav2_for_slam.launch.py
On the PC, use RViz to set a navigation target by clicking 2D Nav Goal. The robot will navigate through the unknown environment while SLAM continuously updates the map.